키메라 상태 분류를 위한 강인한 푸리에 기반 방법
본 논문은 푸리에 변환과 통계적 분류 기법을 결합해 동기화와 비동기화가 공존하는 키메라 현상을 자동으로 구분하는 새로운 프레임워크를 제시한다. 이를 1‑단순 복합체 위에 정의된 토폴로지 신호와 디랙 연산자를 이용한 피츠휴-너거드 모델에 적용해 네트워크 토폴로지와 파라미터 변화에 강인함을 확인하였다.
저자: S. Nirmala Jenifer, Riccardo Muolo, Paulsamy Murugan
본 논문은 동질적인 진동자 집합에서 동기화와 비동기화가 동시에 나타나는 키메라 현상을 체계적으로 구분하고 분류하기 위한 새로운 방법론을 제시한다. 기존 연구에서는 전역 오더 파라미터, 로컬 코히어런스 지표 등 다양한 정량적 척도를 사용했지만, 이들 방법은 임계값 설정, 시스템 규모, 잡음 등에 민감해 일관된 결과를 얻기 어렵다는 한계가 있었다. 이를 극복하고자 저자들은 푸리에 변환을 기반으로 한 신호 분석과 통계적 군집화를 결합한 프레임워크를 고안하였다.
먼저, 연구 대상 모델은 1‑단순 복합체(노드와 링크) 위에 정의된 토폴로지 신호이며, 피츠휴‑너거드(FHN) 방정식을 이용해 각 노드와 링크에 각각 두 개의 동적 변수를 부여한다. 노드와 링크는 디랙 연산자를 통해 상호 연결되며, 이는 고차 네트워크 이론에서 제시되는 고차 상호작용을 수학적으로 구현한 형태이다. 모델은 링 구조를 기본으로 하며, 각 노드는 양쪽으로 P개의 이웃과 비국소적으로 연결된다. 또한, 특정 링크의 방향을 바꾸는 ‘오리엔테이션 1’과 ‘오리엔테이션 2’ 두 가지 변형을 도입해, 균일한 동질 해가 존재하지 않도록 설계하였다.
이론적 분석에서는 동질 해(모든 노드가 동일한 고정점에 수렴)의 존재와 안정성을 라플라시안(L0)과 1‑호지 라플라시안(L1)의 고유값을 이용해 전개하였다. Jacobian 행렬을 고유모드별로 분해하고, 특성 다항식의 근을 통해 (u*,v*)=(±√3,−b/c) 고정점은 항상 안정하고 (0,−b/c) 고정점은 불안정함을 확인했다. 그러나 실제 시뮬레이션에서는 P와 Q(재배치된 링크 수)의 조합에 따라 균일 해가 파괴되고, 키메라와 무질서 상태가 나타난다. 특히, P를 변화시킨 경우 안정성 영역이 비단조적으로 변하며, 작은 P에서는 거의 모든 초기 조건이 균일 해에 머무르지만, 중간 P에서는 키메라가 활발히 발생하고, 큰 P에서는 무질서가 지배한다는 결과를 도출했다.
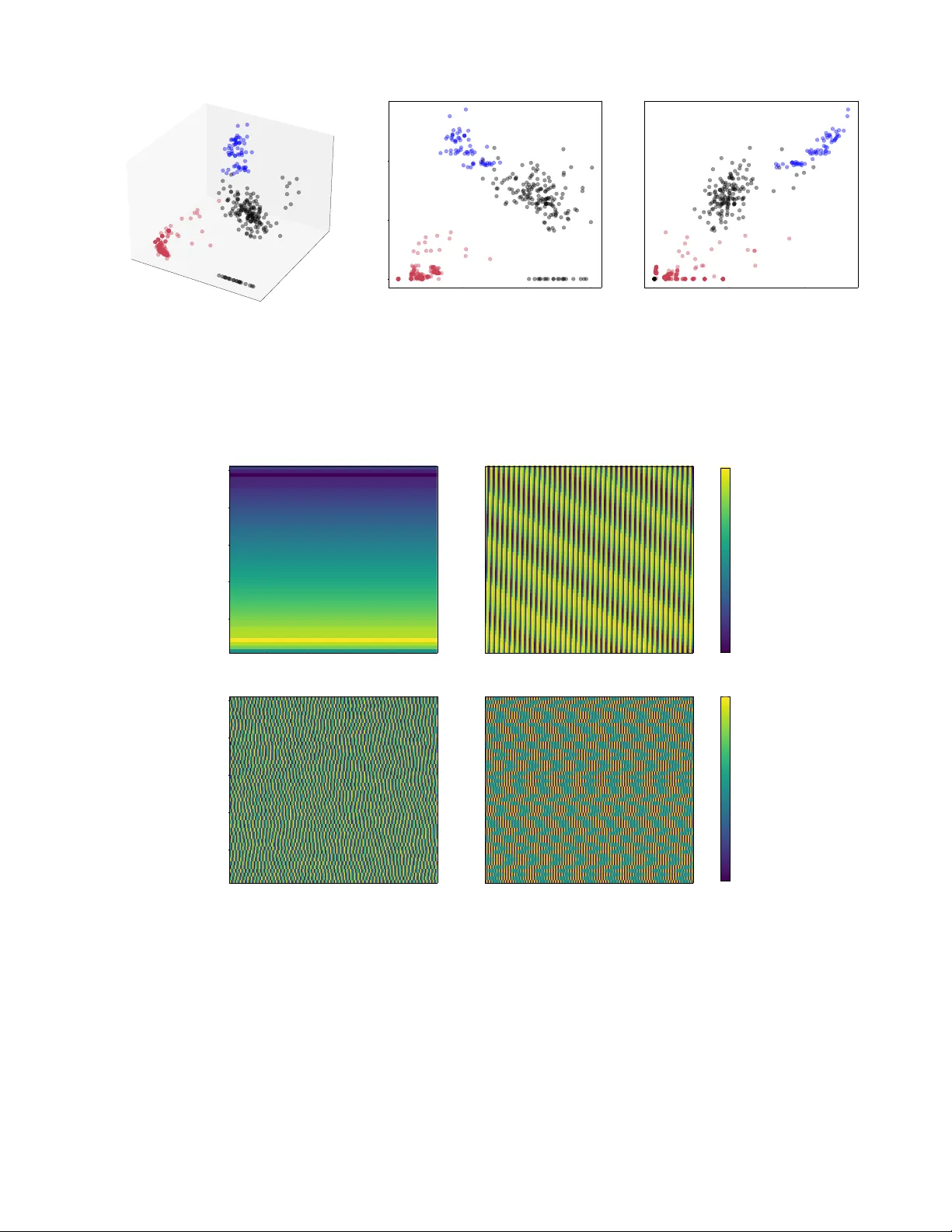
핵심 방법론은 다음과 같다. (1) 각 노드에서 시간 시계열을 수집하고, 윈도우드 푸리에 변환을 적용해 순간 진폭 ⟨a_i⟩, 위상 ⟨θ_i⟩, 주파수 ⟨Ω_i⟩를 추출한다. (2) 이 세 변수에 대해 전체 네트워크에 걸친 정규화 변동량(TNV, total normalized variation)을 계산하여, 공간적 부드러움을 정량화한다. (3) 각 노드에 대해 (TNV_amplitude, TNV_phase, TNV_frequency) 세 축을 3‑차원 특징 벡터로 구성한다. (4) 계층적 군집화(agglomerative clustering)와 덴드로그램을 이용해 자동으로 군집을 형성하고, 군집 수를 사전 정의하지 않은 상태에서 동기화, 키메라, 무질서 세 가지 클래스로 라벨링한다.
시뮬레이션 설정은 n=50~100 노드, a=0.05, b=0, c=−0.01 등 고정 파라미터 하에, Q=P인 경우와 Q를 0~P 사이에서 변화시키는 경우를 모두 조사하였다. 시간 구간은
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기