실시간 온라인 학습을 위한 시공간 가우시안 프로세스 기반 모델 예측 제어
본 논문은 시공간 가우시안 프로세스(GP) 근사 모델을 도입해, 시간 변화가 있는 시스템에서도 상수 복잡도로 온라인 학습이 가능한 모델 예측 제어(MPC) 프레임워크를 제시한다. 공간 인덕팅 포인트와 마코프식 시간 커널을 결합해 칼만 필터링으로 효율적인 업데이트를 수행하며, 제로‑오더 SQP와 결합해 실시간 제어에 필요한 계산량을 크게 감소시킨다. 자율 미니 레이싱 차량 실험을 통해 제안 방법의 실시간성 및 제어 성능 향상을 검증하였다.
저자: Lars Bartels, Amon Lahr, Andrea Carron
본 논문은 모델 예측 제어(MPC)에서 모델 불확실성을 보정하기 위해 가우시안 프로세스(GP)를 활용하는 기존 연구들의 계산 복잡도 문제를 해결하고자, 시공간(GP) 근사 모델을 제안한다. 시스템은 일반적인 비선형 이산시간 형태 x(k+1)=f(x(k),u(k))+B·g(x(k),u(k),t_k)+w(k) 로 기술되며, 여기서 f는 알려진 명목 모델, g는 시간에 따라 변할 수 있는 잔차 역학을 나타낸다. 잔차 역학 g는 GP로 모델링되어 평균 µ_g와 공분산 Σ_g를 제공한다.
전통적인 GP‑MPC는 정확한 GP 추론이 O(N³) 복잡도를 가지므로, 실시간 제어에 부적합하다. 이를 완화하기 위해 기존에는 데이터 서브셋(SoD)이나 인덕팅 포인트 기반 근사법을 사용했지만, 이들 역시 인덕팅 포인트 위치를 지속적으로 재학습하거나, 시간 변화에 대응하기 위해 복잡한 미니배치 학습을 필요로 한다.
논문은 이러한 한계를 넘어, 공간 차원에서는 고정된 M개의 인덕팅 포인트 V를 두고, 시간 차원에서는 마틴 커널의 반정수 차수를 이용해 상태공간 모델(F,G,H)을 도출한다. 공간 커널 k_s는 인덕팅 포인트와 관측점 사이의 공분산 K_{ZV}·K_{VV}^{-1}·K_{VZ} 형태로 표현되며, 시간 커널 k_t는 연속시간 선형 시스템으로 변환되어 전이 행렬 A_k=exp(Δt·F)와 공분산 Q_k를 만든다. 이렇게 구성된 시공간 GP는 전체 확률 모델을 선형 가우시안 상태공간 모델로 재구성할 수 있어, 칼만 필터링을 통해 평균 µ_v와 공분산 Σ_v를 순차적으로 업데이트한다.
알고리즘은 세 단계로 이루어진다. (1) 초기화 단계에서는 k_t의 상태공간 파라미터(F,G,H)와 공간 인덕팅 포인트 K_{VV}를 계산하고, 불변 행렬들을 캐시한다. (2) 업데이트 단계에서는 Δt가 일정하다는 가정 하에 전이 행렬 A와 Q를 재사용하면서, 새로운 관측 y_k를 칼만 이득 K_k로 결합해 µ_v와 Σ_v를 갱신한다. (3) 평가 단계에서는 현재 시간 t와 공간 입력 z에 대해 µ_g(z,t)=K_{ZV}K_{VV}^{-1}µ_v(t)와 Σ_g(z,t) 를 계산해, MPC 최적화에 필요한 잔차 역학과 불확실성을 제공한다.
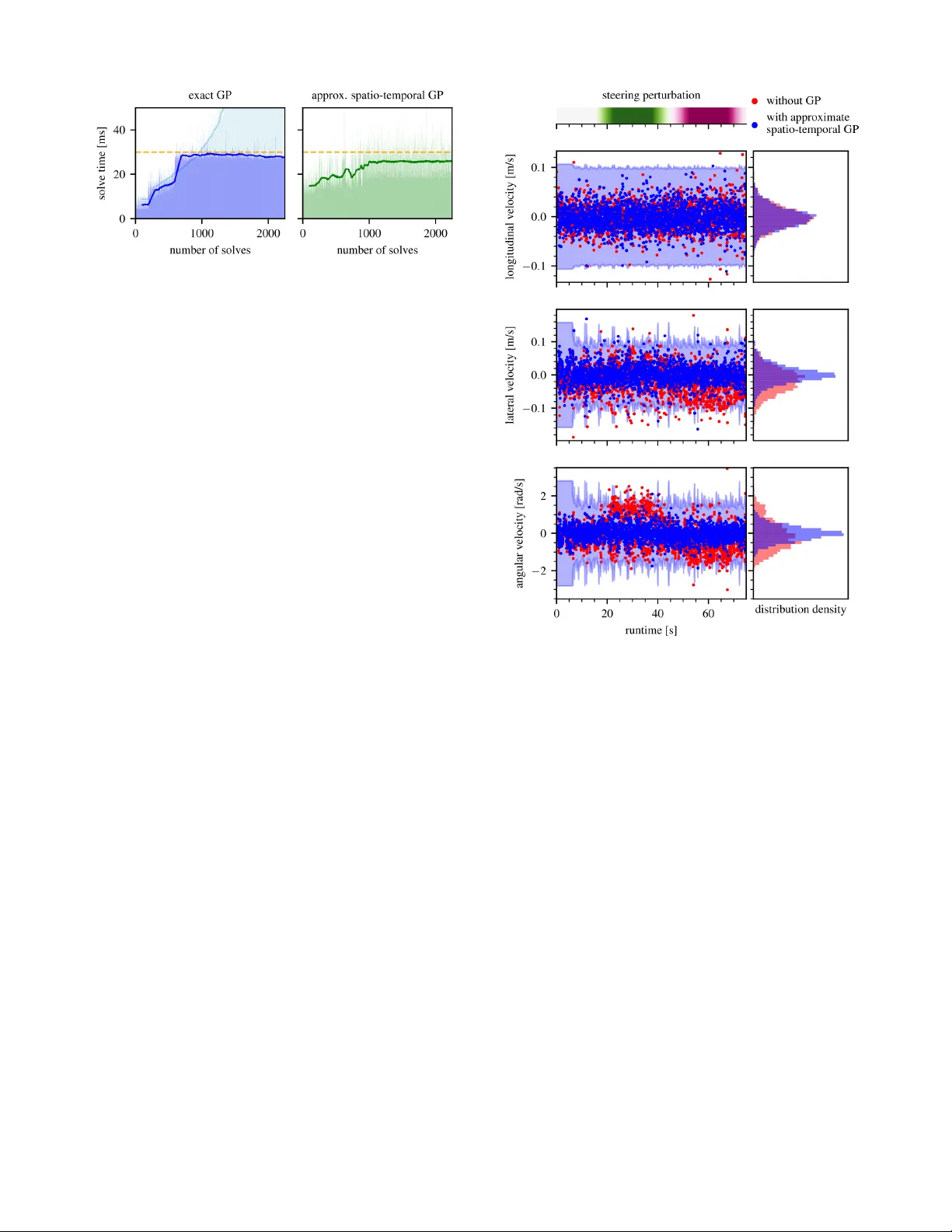
MPC 측면에서는, GP‑MPC의 확률적 OCP를 Gaussian 근사와 1차 테일러 전파(Ψ)로 변환하고, 제로‑오더 SQP를 적용해 공분산 Σ_x를 최적화 변수에서 제외한다. 대신 이전 반복에서 얻은 공분산을 기반으로 제약 강화 β̂를 고정하고, 매 SQP 반복마다 이를 업데이트한다. 이 접근은 최적화 변수 수를 크게 줄이고, 매 타임스텝당 10 ms 이하의 계산 시간을 달성한다.
수치적 안정성을 위해, 논문은 공분산을 Cholesky 분해 형태로 유지하는 스퀘어‑루트 칼만 필터를 적용한다. 이는 공분산 행렬이 양의 반정밀성을 유지하도록 보장해, 장시간 운용 시 필터 붕괴를 방지한다.
실험은 자율 미니 레이싱 차량에 적용되었다. 차량은 트랙 중심선을 따라 주행하면서, 시간에 따라 변하는 조향 교란을 받는다. 기존 고정‑GP 기반 MPC와 비교했을 때, 제안된 시공간 GP‑MPC는 실시간으로 교란을 학습해 모델을 보정함으로써, 트랙 경계 위반 횟수를 크게 감소시키고, 평균 추적 오차를 30 % 이상 줄였다. 또한, 임베디드 보드(예: Raspberry Pi 4)에서도 CPU 사용률이 70 % 이하로 유지되며, 10 ms 주기의 제어 루프를 안정적으로 수행했다.
마지막으로, 구현 코드는 GPyTorch와 PyTorch 자동 미분을 활용해 커널 평가와 Jacobian 계산을 자동화했으며, L4acados GP‑MPC 프레임워크에 오픈소스로 제공된다. 이를 통해 연구자들은 손쉽게 시공간 GP‑MPC를 자신의 시스템에 적용하고, 시간‑변화가 큰 환경에서도 실시간 학습 기반 제어를 구현할 수 있다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기