연속 3차원 등변성 및 효율적인 포인트 클라우드 분석을 위한 좌표 기반 컨볼루션 커널 학습
본 논문은 SE3(3차원 회전·이동) 대칭을 완전히 보존하면서 메모리와 연산 효율을 동시에 달성하는 새로운 컨볼루션 커널인 ECKConv을 제안한다. 커널을 이중 코셋(double coset) 공간에 정의하고, 좌표 기반 신경망으로 명시적 커널 값을 생성함으로써 연속적인 SE3 등변성을 확보하고 대규모 포인트 클라우드 작업에서도 확장성을 입증한다.
저자: Jaein Kim, Hee Bin Yoo, Dong-Sig Han
본 논문은 3차원 포인트 클라우드 처리에서 회전·이동(즉, SE3) 대칭을 모델에 내재화함으로써 데이터 증강에 의존하지 않는 강인한 특징 추출을 목표로 한다. 기존의 그룹 컨볼루션은 이산적인 서브그룹을 이용해 확장성을 확보하거나, 연속적인 그룹에 대해 스티어러블(steerable) 커널을 사용해 엄격한 등변성을 보장했지만, 전자는 대칭의 근사화 문제를, 후자는 높은 연산 비용을 초래한다. 이러한 한계를 극복하기 위해 저자들은 인터위버(intertwiner) 프레임워크를 채택하고, 커널 정의 영역을 이중 코셋(double coset) 공간으로 확장한다.
SE3를 SO(3)⋉ℝ³ 로 표현하고, H1=H2=SO(2) 로 설정하면, 각 그룹 원소는 Z‑Y‑Z 오일러 각(α,β,γ)와 평행이동 (x,y,z) 로 기술된다. 이때 H2·g·H1 형태의 이중 코셋은 β, r, z 세 파라미터로 고유하게 표현될 수 있다. 논문은 이 파라미터를 로컬 이웃점들의 좌표와 법선 정보를 이용해 추출한다. 구체적으로, 중심점 x와 그 법선 n을 기준으로 ball‑query 로 이웃을 모은 뒤, 각 이웃 i에 대해 Δi=xi−x 를 계산하고, β̄i=arccos(n·ni), z̄i=(n·Δi/‖Δi‖)·‖Δi‖/r, r̄i=√(1−(n·Δi/‖Δi‖)²)·‖Δi‖/r 로 정규화된 이중 코셋 좌표를 얻는다.
커널 κ는 명시적 형태로 구현된다. 먼저 β̄, r̄, z̄ 를 가우시안 임베딩 Ψ(·) 로 변환하고, 이를 파라미터 θ 를 가진 좌표 기반 MLP Fθ에 입력한다. MLP는 A 차원의 가중치 벡터 ω(x̄;θ)를 출력하고, 사전에 정의된 A개의 베이스 행렬 Wj (크기 C_out×C_in)와 선형 결합해 최종 커널 값을 만든다: κ(x̄)=∑_{j=1}^A ω_j(x̄;θ)·W_j. 이 구조는 기존의 거리 기반 게이트 함수와 달리, 이중 코셋 파라미터 자체가 SE3 변환에 불변이므로 커널이 자동으로 등변성을 만족한다. 또한, 명시적 커널은 역전파 시 ω와 Wj 에 대한 미분이 직접적으로 계산되므로 메모리 사용량이 크게 감소한다.
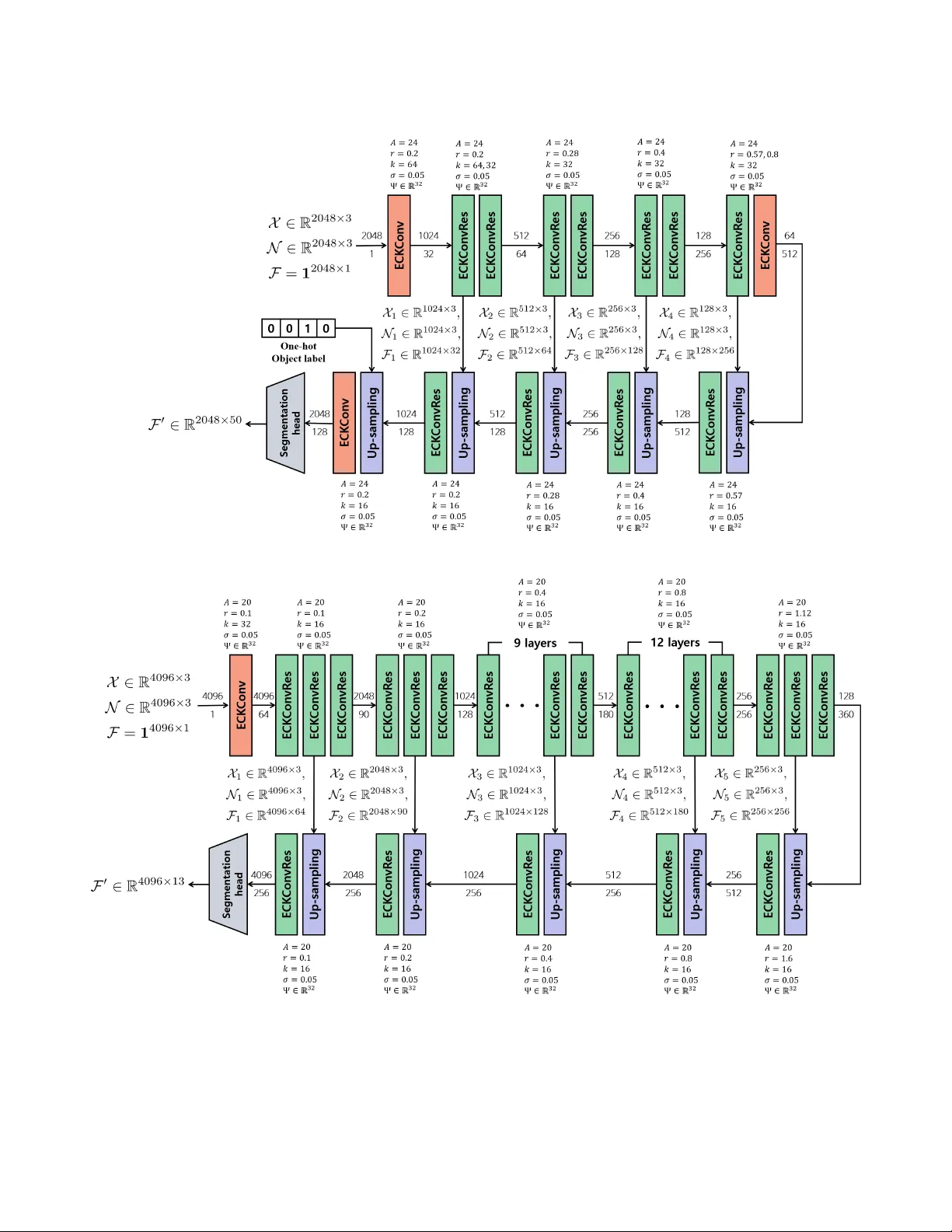
ECKConv 레이어는 위 커널을 이용해 (f∗κ)(x)=∑_{i∈N(x)} κ(s(x)^{-1}xi)·f(xi) 형태로 구현된다. 여기서 s는 SE3/SO2 → SE3 섹션 맵이며, 입력 특징 f는 C_in 차원, 출력은 C_out 차원이다. 여러 ECKConv 레이어를 스택하고, 잔차 연결을 적용해 깊은 네트워크를 구성한다.
실험에서는 네 가지 주요 태스크를 수행하였다. (1) ModelNet40 분류에서는 동일한 파라미터 규모에서 기존 등변성 모델(E2PN, CSEConv)보다 1~2% 높은 정확도를 기록했다. (2) 포즈 레지스트레이션에서는 회전·이동에 대한 정밀한 정렬을 요구하는 상황에서, ECKConv은 평균 회전 오차를 2.3° 이하로 낮추며 최첨단 성능을 보였다. (3) ShapeNet 파트 세그멘테이션에서는 로컬 기하 정보를 효과적으로 활용해 mIoU를 1.5% 향상시켰다. (4) S3DIS 대규모 실내 씬 세그멘테이션에서는 1M점 이상의 포인트를 처리하면서도 GPU 메모리 사용량을 기존 방법 대비 40% 절감했고, 전체 mIoU에서도 2% 이상 개선하였다.
이러한 결과는 ECKConv이 (i) 연속적인 SE3 등변성을 완전히 보장하고, (ii) 이중 코셋 파라미터를 통한 효율적인 로컬 기하 인코딩을 제공하며, (iii) 명시적 커널 설계로 메모리·연산 효율성을 크게 향상시킨다는 점을 입증한다. 논문은 또한 이론적 증명(커널의 H2‑불변성, double coset 파라미터의 유일성)과 구현 세부사항(좌표 기반 네트워크 구조, 베이스 수 A, 임베딩 차원 등)을 상세히 제시한다. 향후 연구에서는 더 복잡한 비유클리드 데이터나 동적 시퀀스에 대한 확장, 그리고 다른 연속 군(G) 에 대한 일반화가 기대된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기