제한된 입력으로 보장하는 지정시간 안전 제어를 위한 수축 안전관
본 논문은 입력 제한이 있는 비선형 제어‑친화 시스템에 대해, 초기 상태가 목표 안전집합 밖에 있더라도 사용자가 지정한 마감시간 안에 반드시 목표집합에 도달하도록 하는 “수축 안전관”(Constricting Tube) 프레임워크를 제안한다. 시간에 따라 점점 축소되는 안전관을 정의하고, 이 관을 전방 불변하게 유지하도록 하는 단일 선형 제약식만을 QP에 넣어 실시간 제어기를 설계한다. 수축 속도와 입력 한계 사이의 관계를 “장벽 권한”(Barr…
저자: Darshan Gadginmath, Ahmed Allibhoy, Fabio Pasqualetti
본 논문은 “Constricting Tubes for Prescribed-Time Safe Control”이라는 제목으로, 입력 제한이 있는 비선형 제어‑친화 시스템에 대해 초기 상태가 목표 안전집합 C 밖에 있더라도 사용자가 지정한 마감시간 T 안에 반드시 C 안으로 들어가게 하는 새로운 프레임워크를 제시한다. 기존 제어 장벽 함수(CBF) 기반 안전 제어는 초기 위반을 해소하지 못하고, 지정시간 수렴을 위한 기존 방법들은 시간에 따라 무한히 커지는 스케일링 함수를 사용해 제어 입력이 마감시간에 발산하는 문제점이 있었다. 이를 해결하기 위해 저자들은 “수축 CBF”(Constricting CBF)와 “수축 안전관”(constricting tube) 개념을 도입한다.
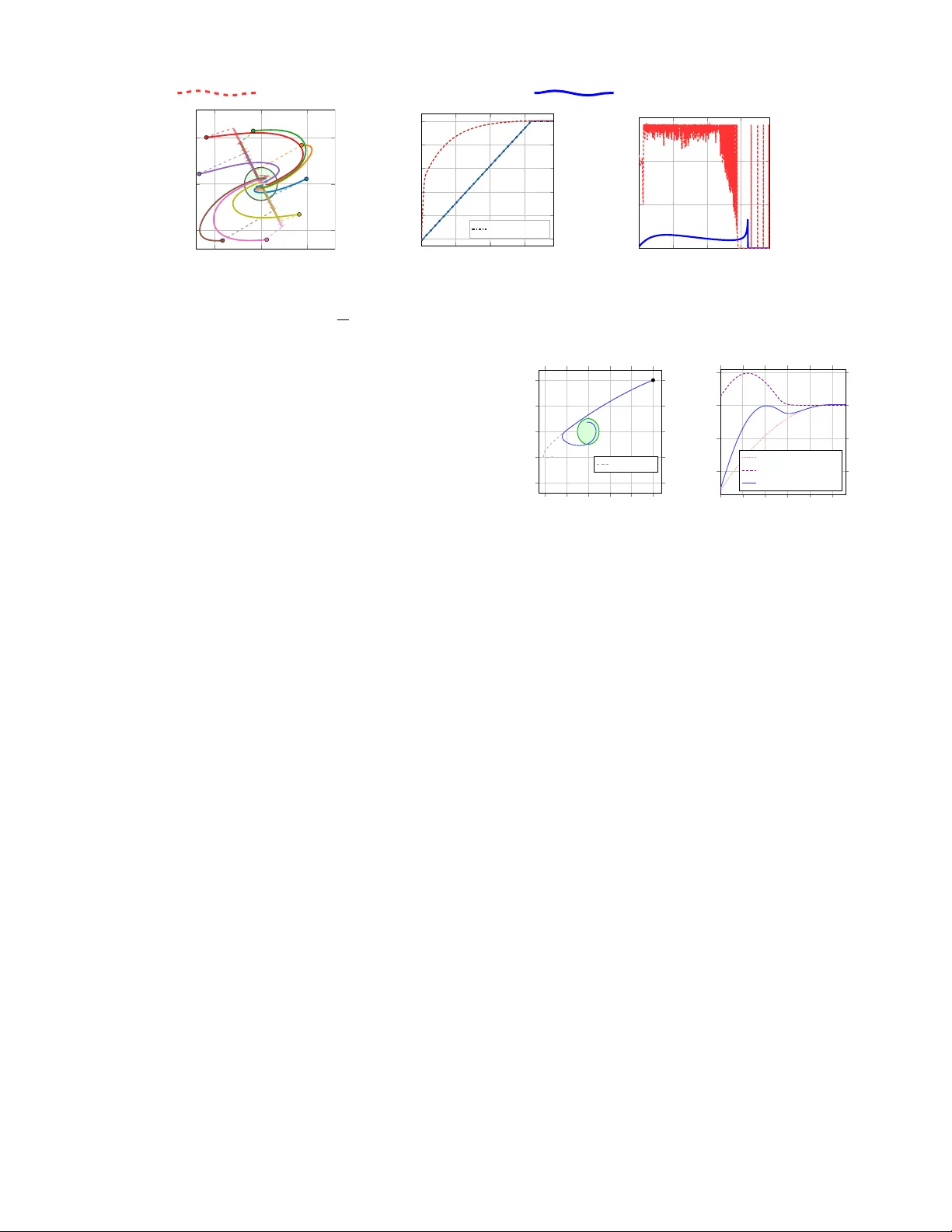
먼저 목표집합 C는 CBF h(x)≥0 로 정의된다. 초기 위반량 r₀ = max{0,−h(x₀)} 를 계산하고, 시간‑의존적인 완화 함수 r(x₀,t) 를 설계한다. r는 C¹이며 (i) 초기 시점에 r(x₀,0)=r₀ 로 안전관을 넓히고, (ii) 마감시간 T에 r(x₀,T)=0 로 목표집합에 정확히 수축한다. (iii) 수축은 단조 감소한다(˙r≤0). 이렇게 정의된 수축 CBF ˜h(x,t)=h(x)+r(x₀,t) 로부터 시간‑변하는 안전관 ˜C(t)={x|˜h(x,t)≥0} 를 얻는다. ˜C(0) 은 초기 상태를 포함하고, ˜C(T)=C 가 된다.
정리 1은 ˜C(t) 를 전방 불변하게 유지하는 제어 u가 존재하면, 시스템은 반드시 T 시점에 C 안에 들어가고 이후에도 C를 유지한다는 것을 증명한다. 구체적인 제어 조건은
Lf h(x)+Lg h(x) u+˙r(t) ≥ −γ(˜h(x,t))
이며, 여기서 γ는 CBF 정의에 쓰이는 확장 클래스‑K 함수이다.
입력 제약 ‖u‖≤u_max 를 고려하면, 제어 가능한 h의 최대 증가율을
σ(x)=max_{‖u‖≤u_max} ĥ̇(x,u)=‖Lg h(x)‖ u_max+Lf h(x)
로 정의한다. σ(x)를 “장벽 권한”(Barrier Authority)이라 부른다. σ(x) 가 양수이면 현재 상태에서 충분한 제어력을 가지고 h를 증가시킬 수 있음을 의미하고, σ(x)≤0이면 어떤 입력을 사용해도 h를 올릴 수 없으므로 CBF 조건이 불가능해진다.
전역적인 실현 가능성을 판단하기 위해 σ_min = inf_{t∈
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기