고속도로 교통 데이터 기반 행동 중심 시나리오 추출 및 도메인 지식 가이드 클러스터링
본 논문은 고속도로 실차량 기록(highD)에서 자율주행차(ADS)의 행동 변화를 기준으로 시나리오를 표준화된 방식으로 추출하고, 행동 변화 유형과 DG‑SFM 기반 상호작용 점수를 라티런트 공간에 주입한 CVQ‑VAE를 이용해 도메인 지식이 반영된 클러스터링을 수행한다. 실험 결과, 제안된 추출·클러스터링 파이프라인이 기존 방법보다 시나리오 일관성을 높이고 해석 가능성을 제공함을 보인다.
저자: Niklas Roßberg, Sinan Hasirlioglu, Mohamed Essayed Bouzouraa
본 논문은 자동운전 시스템(ADS)의 안전성 검증을 위해, 실제 고속도로 교통 데이터를 기반으로 시나리오를 추출하고 이를 의미 있는 카테고리로 군집화하는 전체 파이프라인을 제안한다. 연구 배경으로는 ADS 검증에 있어 시나리오 기반 테스트가 필수적이며, 이를 위해서는 (1) **시나리오 추출** 방법의 표준화와 (2) **시나리오 군집화** 시 도메인 지식의 반영이 필요하다는 점을 제시한다. 기존 연구들은 규칙 기반 혹은 머신러닝 기반으로 각각 시나리오 경계를 정의하거나 군집화를 수행했지만, 규칙 기반은 임계값에 민감하고 확장성이 떨어지며, 순수 머신러닝은 해석 가능성이 낮고 도메인 전문가의 직관과 맞지 않을 위험이 있다.
**1) 시나리오 정의와 추출**
논문은 ‘Scenario‑as‑Specification(SaS)’ 개념을 채택한다. SaS는 ‘ego 차량의 목표 행동이 변할 때 새로운 시나리오가 시작된다’는 원칙에 기반한다. 실제 데이터에서는 목표 행동을 직접 알 수 없으므로, ego 차량의 **행동 변화**(가속·감속·차선 변경 등)를 관측하여 시나리오 경계를 만든다. 이를 위해 longitudinal 가속도 a_x(t)와 lateral 속도 v_y(t)를 이용한 적응형 임계값 탐지기를 설계한다. 가속도는 여러 임계값‑지속시간 쌍을 동시에 적용해 미세한 변화와 급격한 변화를 모두 포착한다. lateral 움직임은 속도 부호가 일정한 구간에서 누적 변위 Δy를 계산하고, 사전 정의된 τ_LC를 초과하면 차선 변경으로 판단한다. 이렇게 검출된 이벤트를 중심으로 고정 관측 기간 T_obs=4 s와 고정 차량 수 N=9를 사용해 시나리오 텐서 ξ∈ℝ^{N×F×T_obs}를 만든다(F=6: 위치·속도·가속도). 차량 수가 부족하면 클러스터링에 영향을 주지 않는 pseudo‑vehicle을 추가한다. 이 과정은 시나리오 간 경계가 일관되게 정의되도록 하며, 이후 라티런트 학습에 동일한 입력 형태를 보장한다.
**2) 도메인 지식 기반 클러스터링**
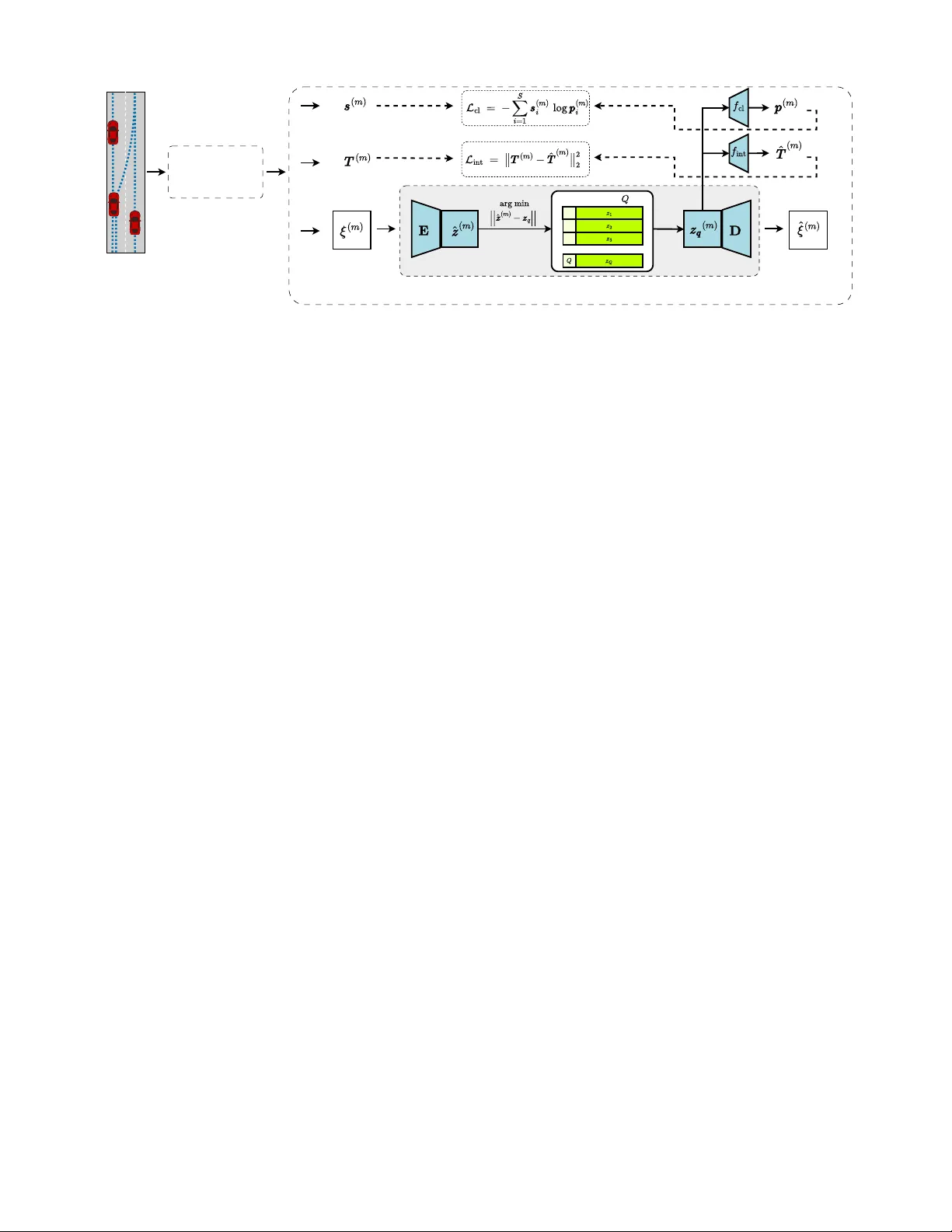
시나리오를 군집화하기 위해 논문은 **Clustering VQ‑VAE(CVQ‑VAE)**를 사용한다. VQ‑VAE는 입력을 코드북에 매핑해 이산 라티런트를 학습하고, CVQ‑VAE는 변분 베이즈 요소를 도입해 라티런트 분포를 연속적으로 모델링한다. 여기서 라티런트 벡터 ẑ=h_θ(ξ)∈ℝ^d는 순수 데이터 특성뿐 아니라 두 종류의 도메인 사전 정보를 반영한다.
- **행동 변화 유형(pseudo‑class)**: 탐지된 이벤트를 ‘가속’, ‘감속’, ‘차선 유지’, ‘차선 변경’, ‘비상 가속/감속’ 등 S개의 카테고리로 원‑핫 인코딩한다. 이는 라티런트 손실에 λ_s·L_s 형태로 가중치를 부여해, 동일 행동 유형을 가진 시나리오가 라티런트 공간에서 가깝게 배치되도록 유도한다.
- **DG‑SFM 기반 상호작용 점수**: 각 이웃 차량 j에 대해 ego i와의 상대 위치·속도를 입력으로 DG‑SFM에서 정의한 ‘egg‑shaped’ repulsive potential을 계산한다. 두 가지 구성요소 ˆβ_Aij와 ˆβ_Bij을 합산·정규화해 시간 단계별 상호작용 점수 T∈
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기