뇌파 기반 실시간 시작·정지 제어를 통한 재활 외골격 로봇 제어
본 연구는 비침습적 EEG를 이용해 운동 상상(MI) 시작과 종료를 실시간으로 디코딩하고, 이를 상지 외골격 로봇의 보조 시작·정지 명령에 직접 연결한다. 8명의 건강한 피험자를 대상으로 두 차례 온라인 세션을 진행했으며, 시작 명령 성공률은 61.5%, 종료 명령 성공률은 64.5%를 기록했다. 기존의 클래스 기반 재센터링이 초래하는 편향을 비대칭 마진 진단으로 규명하고, 클래스에 구애받지 않는 고정점 기반 재센터링을 제안해 AUC를 시작에서…
저자: Kanishka Mitra, Satyam Kumar, Frigyes Samuel Racz
**배경 및 목적**
뇌졸중 등 신경 손상 후 재활 로봇은 고용량·과제‑특이적 훈련을 제공하지만, 대부분이 말단 기계 수준에서 작동해 손상된 신경 회로와의 직접적인 상호작용이 부족하다. 신경‑의도에 기반한 보조는 활동‑의존성 가소성을 촉진할 수 있으나, 기존 BCI‑로봇 시스템은 단일 명령에 의존하거나, 로봇 움직임 중 지속적인 MI 유지에 의존해 신호 잡음에 취약했다. 본 연구는 이러한 한계를 극복하고, 시작과 종료 두 상태를 동시에 디코딩해 로봇 보조를 실시간으로 시작·정지시키는 시스템을 개발한다.
**참가자 및 장비**
건강한 오른손잡이 성인 8명(평균 24.3 yr, 여성 1명)을 모집했으며, 64채널 EEG(eego, ANT Neuro)를 10‑10 체계에 따라 부착했다. T7, T8, M1, M2 채널은 잡음으로 제외하였다. 시각적 고정점을 제공하기 위해 로봇 팔에 LED를 부착했으며, 감각‑임계 근전기 자극(stNMES) 패드를 삼두근·이두근에 각각 배치해 시작·정지 MI 동안 각각 자극을 제공했다. 로봇은 Harmony SHR®(Harmonic Bionics)이며, 7자유도(각 팔)와 스캐풀라‑흐머럴 협조 제어를 갖는다.
**실험 프로토콜**
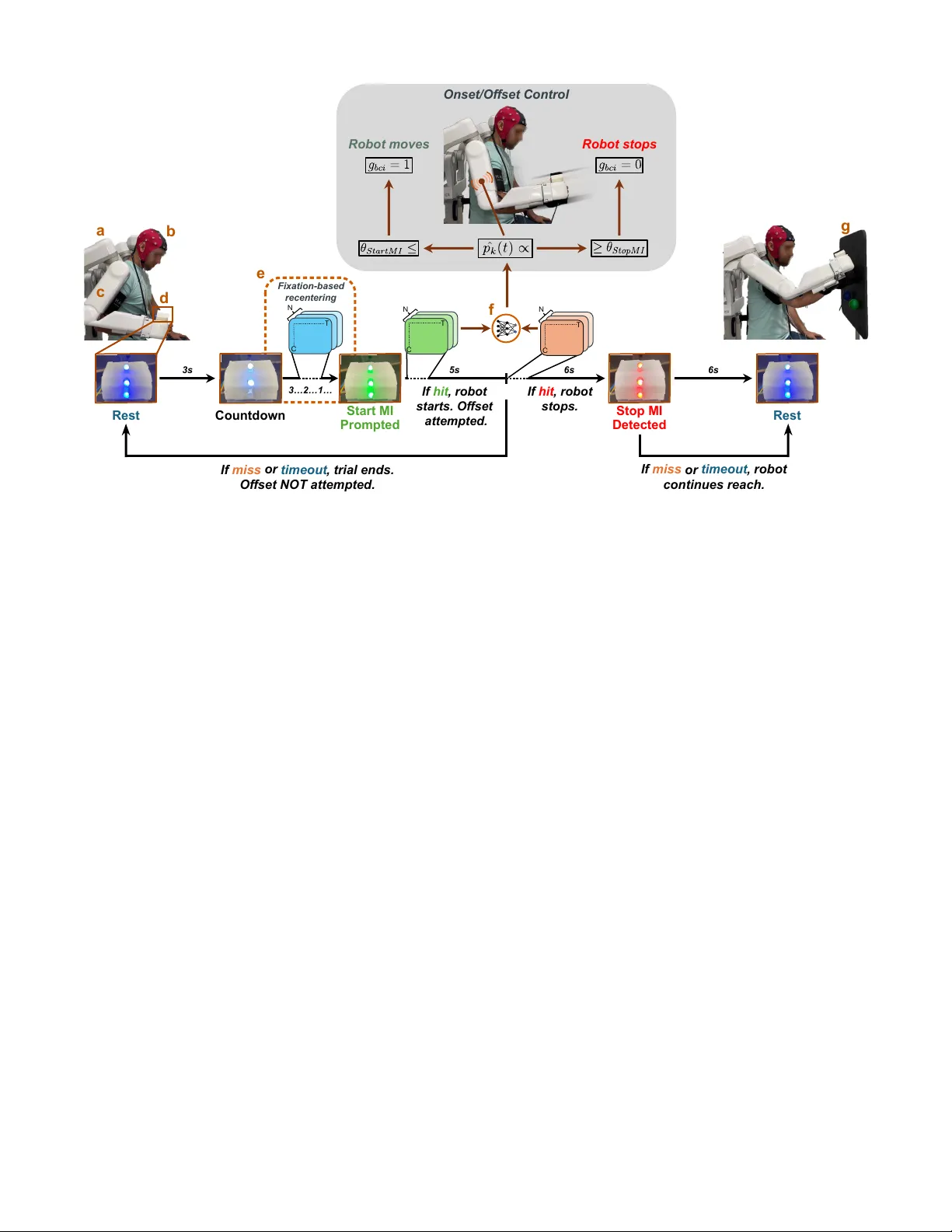
세션은 (1) 오프라인 캘리브레이션(6 run × 20 trial), (2) 온라인 시작·정지 제어 세션 2회로 구성된다. 오프라인에서는 3 s 휴식 → 3 s 카운트다운 → 3 s 시작 MI → 로봇이 목표 방향으로 이동 → 3 s 정지 MI → 휴식 순으로 진행돼, 시작 MI와 정지 MI 각각 Rest·Maintain와 대비되는 라벨을 얻는다. 온라인에서는 시작 MI가 감지되면 로봇이 목표로 이동하고, 사용자는 목표 근처에서 스스로 정지 MI를 전환해 로봇을 멈추도록 요구한다. 시작 명령은 5 s 이내, 정지 명령은 움직임 시작 후 6 s 이내에 감지돼야 하며, 미감지 시 타임아웃으로 처리한다.
**디코딩 파이프라인**
EEG는 8–30 Hz 대역으로 필터링 후 공통 평균(reference) 처리한다. 1 s 길이의 데이터(512 샘플)를 사용해 trace‑normalized 공분산 Σ_t을 계산하고, SPD 매니폴드 상에서 AIRM 거리를 이용해 클래스 평균(¯Σ_k)을 구한다. 세션 간 드리프트 보정을 위해 ‘세션 재센터링’(S_train, S_online)을 적용하고, 각 공분산을 S^{-1/2}·Σ·S^{-1/2} 형태로 변환한다. 변환된 공분산과 클래스 평균 사이의 거리 d_k(t)를 소프트맥스(온도 α)로 후확률 p_k(t)로 변환하고, EMA(β)로 평활화한다. 각 클래스에 대해 오프라인 ROC 분석으로 임계값 θ를 설정하고, 연속 0.25 s 초과 시 명령을 발행한다.
**편향 진단 및 고정점 기반 재센터링**
기존 재센터링은 모든 클래스에 동일 변환을 적용해 클래스 간 비대칭 마진을 유발한다는 것을 비대칭 마진 진단으로 확인했다. 이를 해결하기 위해 시각 고정점(LED) 동안 수집된 연속 데이터를 이용해 온라인 평균을 실시간으로 업데이트하고, 해당 평균의 역제곱근을 화이트닝 변환으로 적용하는 ‘고정점 기반 재센터링’을 제안한다. 이 방법은 클래스 라벨을 필요로 하지 않으며, 클래스 기하학을 보존하면서 드리프트를 추적한다.
**성과**
두 온라인 세션에서 평균 성공률은 시작 61.5%, 정지 64.5%였으며, 이는 기존 단일 명령 시스템보다 높은 실시간 제어 가능성을 보여준다. 고정점 기반 재센터링 적용 후 AUC는 시작에서 0.71→1.11(+56%, p=0.0117), 정지에서 0.68→0.91(+34%, p=0.0251)로 유의하게 향상되었다. 또한, 하루 간 및 세션 간 편향이 현저히 감소해, 동일 피험자에 대한 장기 사용 시 안정성을 확보했다.
**의의 및 향후 과제**
본 연구는 (1) 시작·정지 양쪽을 실시간으로 디코딩한 최초 사례, (2) Riemannian 기하학 기반 드리프트 보정 기법, (3) 클래스 편향을 정량·완화한 방법론을 제공함으로써, 신경가소성에 최적화된 ‘의도‑조건부’ 로봇 보조의 실현 가능성을 크게 높였다. 향후 연구에서는 뇌졸중 환자와 같은 병리적 군에서의 적용, 다중 자유도 복합 움직임에 대한 일반화, 그리고 장기 사용 시 피로·학습 효과를 고려한 적응형 임계값 조정 등을 탐색할 필요가 있다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기