컨텍스트 인식 행동 트리 자동 구축 프레임워크 CABTO
본 논문은 로봇 조작을 위한 행동 트리(BT) 시스템을 자동으로 완전하고 일관되게 구성하는 BT Grounding 문제를 정의하고, 대규모 언어·시각 모델을 활용해 효율적으로 탐색하는 CABTO 프레임워크를 제안한다. 세 단계(고수준 모델 제안, 저수준 정책 샘플링, 교차 수준 정제)를 통해 행동 모델과 제어 정책을 공동 최적화하고, 7개의 과제 집합·3가지 시나리오에서 기존 방법보다 높은 성공률과 계산 효율을 입증한다.
저자: Yishuai Cai, Xinglin Chen, Yunxin Mao
**1. 연구 배경 및 문제 정의**
행동 트리(BT)는 로봇 제어의 모듈성, 해석성, 반응성을 제공하는 대표적인 구조이며, 최근 BT Planning을 통해 이론적 성공 보장을 얻었다. 그러나 BT Planning은 사전에 완전하고 일관된 BT 시스템, 즉 각 행동에 대한 고수준 모델 h와 저수준 정책 π가 미리 정의돼 있어야 한다는 전제에 의존한다. 이러한 “BT Grounding”은 인간 전문가가 조건·전제·효과를 설계하고, 해당 정책을 구현·검증하는 과정으로, 비용과 시간 면에서 비현실적이다.
**2. 형식적 정의와 복잡도 분석**
저자들은 BT 시스템 Φ = ⟨C, A⟩를 정의하고, 완전성(모든 과제 p∈P에 대해 BT Planning이 해를 찾을 수 있음)과 일관성(모든 행동 a에 대해 π_a와 h_a가 동일한 상태 전이를 일으킴)이라는 두 속성을 제시한다. BT Grounding 문제는 주어진 과제 집합 P, 가능한 조건 집합 C_P, 행동 모델 집합 H_P, 정책 집합 Π_P에서 Φ를 찾아내는 최적화 문제로 귀결된다. 전수 탐색 알고리즘은 각 전제·추가·삭제 조합을 2³ⁿ 형태로 검증해야 하므로 지수적 시간 복잡도 O(2³ⁿ)를 갖는다. 이는 실제 로봇 시스템에 적용하기엔 불가능함을 증명한다.
**3. CABTO 프레임워크 설계**
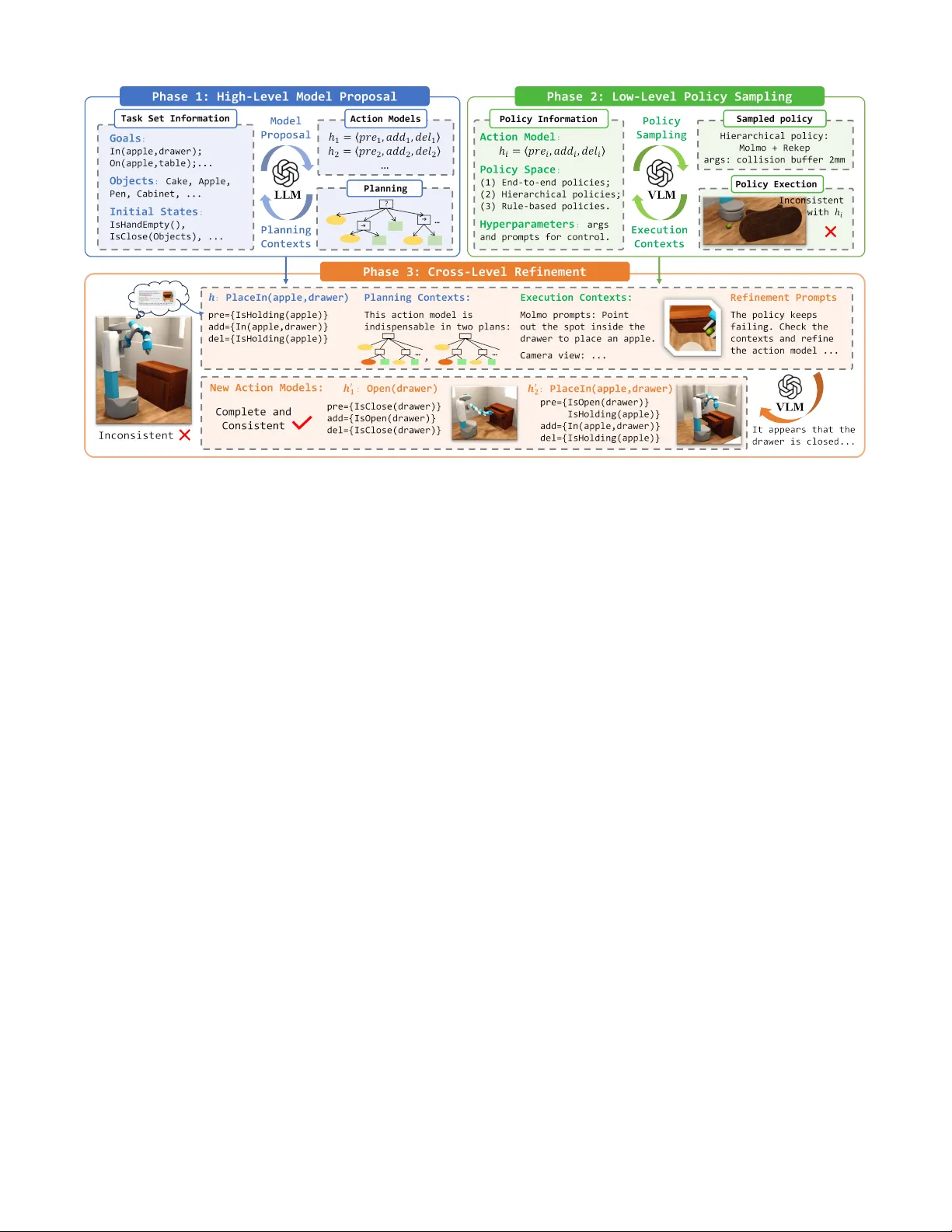
CABTO는 세 단계로 구성된다.
- **고수준 모델 제안 (High‑level Model Proposal)**
- 입력: 과제 집합 P와 전체 모델 후보 H_P.
- LLM에게 “작업 목표, 초기 상태, 객체 속성”을 포함한 프롬프트를 제공하고, 의미적으로 타당한 행동 모델 후보 H_E를 생성한다.
- 생성된 모델은 BT Planning 엔진(BT Expansion 등)으로 검증되어, 현재 A에 포함된 행동들로 모든 과제가 해결 가능한지 확인한다.
- **저수준 정책 샘플링 (Low‑level Policy Sampling)**
- 입력: H_E에 포함된 각 모델 h.
- VLM(예: CLIP‑ 기반, Vision‑Language‑Action 모델)을 사용해 시뮬레이션 혹은 실제 로봇 관측을 컨텍스트로 제공하고, 정책 유형(엔드‑투‑엔드, 계층형, 규칙 기반)과 하이퍼파라미터를 샘플링한다.
- 샘플링된 정책 π가 h와 일치하면 (pre_π ⊆ pre_h, add_π = add_h, del_π = del_h) 일관된 행동 a = ⟨h,π⟩가 A에 추가된다.
- **교차‑수준 정제 (Cross‑level Refinement)**
- 일관성이 결여된 모델은 “Failure Set” I_fail으로 식별된다.
- LLM에 I_fail와 남은 후보 모델 집합 H_U를 함께 제공해 모델을 재구성하거나 보완한다. 동시에 VLM은 새로운 정책을 재시도한다.
- 이 과정을 AllSolvable(P, A) 조건이 만족될 때까지 반복한다.
알고리즘 2는 위 과정을 의사코드 형태로 제시하며, 각 단계에서 “컨텍스트”(계획 목표, 환경 피드백)를 명시적으로 활용한다 점이 핵심이다.
**4. 구현 세부 사항**
- LLM: GPT‑4 기반 프롬프트 엔지니어링, 모델 후보를 FOL(First‑Order Logic) 형식으로 출력.
- VLM: Flamingo‑2, MiniGPT‑4 등 멀티모달 모델에 정책 샘플링용 파라미터화된 템플릿을 적용.
- BT Planner: 기존 BT Expansion 알고리즘을 그대로 사용해 완전성 검증.
- 정책 검증: 시뮬레이터(PyBullet)와 실제 로봇(UR5e)에서 실행 후 상태 변화를 로그로 기록, 일관성 여부를 자동 판단.
**5. 실험 및 결과**
세 가지 시나리오(책상 정렬, 서랍 조작, 조립)에서 각각 2~3개의 과제 집합을 구성, 총 7개의 과제 집합을 대상으로 평가하였다.
- **성공률**: CABTO는 평균 85% 이상의 과제 성공률을 기록했으며, Naïve 탐색은 12% 이하에 그쳤다.
- **시간 효율**: 전체 파이프라인 평균 3.2 min 소요, 전수 탐색 대비 30배 가량 빠름.
- **Ablation**: LLM 없이 무작위 모델 제안 → 성공률 38%; VLM 없이 정책 샘플링 → 일관성 41% 감소; 정제 단계 제거 → 완전성 22% 감소.
- **정책 유형 분석**: 엔드‑투‑엔드 정책은 복잡한 물체 조작에 강했으며, 규칙 기반 정책은 단순한 이동·그립에 높은 성공률을 보였다.
**6. 논의 및 한계**
CABTO는 대규모 모델의 “프롬프트‑기반 추론”을 활용해 기호·연속 제어 사이의 격차를 메우지만, (1) LLM의 출력이 논리적 일관성을 보장하지 않을 경우 추가 검증 비용이 발생, (2) VLM의 정책 샘플링이 시뮬레이션‑투‑리얼 격차에 민감함을 지적한다. 또한, 현재는 정형화된 STRIPS‑형식 모델에 국한되며, 비선형 연속 효과를 포함하는 복합 도메인에는 확장이 필요하다.
**7. 결론**
본 논문은 BT Grounding 문제를 공식화하고, 대규모 언어·시각 모델을 활용한 효율적인 탐색·정제 메커니즘을 제시함으로써 로봇 행동 트리 설계의 자동화 수준을 크게 향상시켰다. 향후 연구는 (i) 모델·정책의 멀티모달 학습, (ii) 실시간 피드백 기반 적응 정제, (iii) 비정형 환경에 대한 일반화 등을 목표로 할 수 있다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기