VR에서 중간보도 횡단 시 보행자‑차량 위험 프로파일 평가
본 연구는 토론토와 뉴캐슬에서 수행된 대규모 가상현실 실험 데이터를 활용해, 보행자와 차량(자율주행차와 인간운전차) 간의 상호작용을 다중 지표 기반의 잠재 위험 프로파일로 구분한다. 잠재 프로파일 분석(LPA)을 적용해 4~6개의 위험 유형을 도출하고, AV 전용 세션이 뉴캐슬에서는 고위험 프로파일 비중을 유의하게 높이는 반면, 토론토에서는 차이 없이 나타난다. 이는 지역적 맥락이 AV와 보행자 간 위험 인식에 중요한 역할을 함을 시사한다.
저자: Rulla Al-Haideri, Bilal Farooq, Elisabetta Cherchi
이 논문은 자율주행차(AV)와 인간운전차(HDV)가 혼재하는 교통 환경에서 보행자와 차량 간 중간보도 횡단 시 발생하는 위험을 가상현실(VR) 실험을 통해 정량적으로 분석한다. 연구팀은 캐나다 토론토와 영국 뉴캐슬 두 도시에서 각각 109명·249명의 참가자를 모집해, 60초 길이의 횡단 세션을 12~24회 반복하도록 설계하였다. 각 세션은 차량 흐름, 날씨, 도로 중앙분리대 유무, 보행자 군집 행동 등 다양한 조건을 체계적으로 변형시켰으며, AV와 HDV를 구분해 실험을 진행했다.
데이터는 0.1초 간격으로 기록된 보행자와 차량의 위치·속도 정보를 1초 간격으로 재표본화하고, 잡음을 감소시키기 위해 스무딩을 적용했다. 이후 세 가지 시간 기반 충돌 지표를 계산하였다. (1) 수정된 시간‑대‑충돌(MTTC)은 충돌 코스에 있는 경우에만 정의되며, 가속도 보정 하에 두 객체가 충돌할 예상 시간을 제공한다. (2) 도착 시간(T2)은 두 객체 중 늦게 도착하는 객체가 충돌 지점에 도달할 예상 시간을 나타내며, 충돌 코스가 아니어도 의미가 있다. (3) 폐쇄 시간‑대‑충돌(CTTC)은 현재 거리와 라인‑오브‑사이트 속도를 이용해 즉시 닫히는 속도를 측정한다.
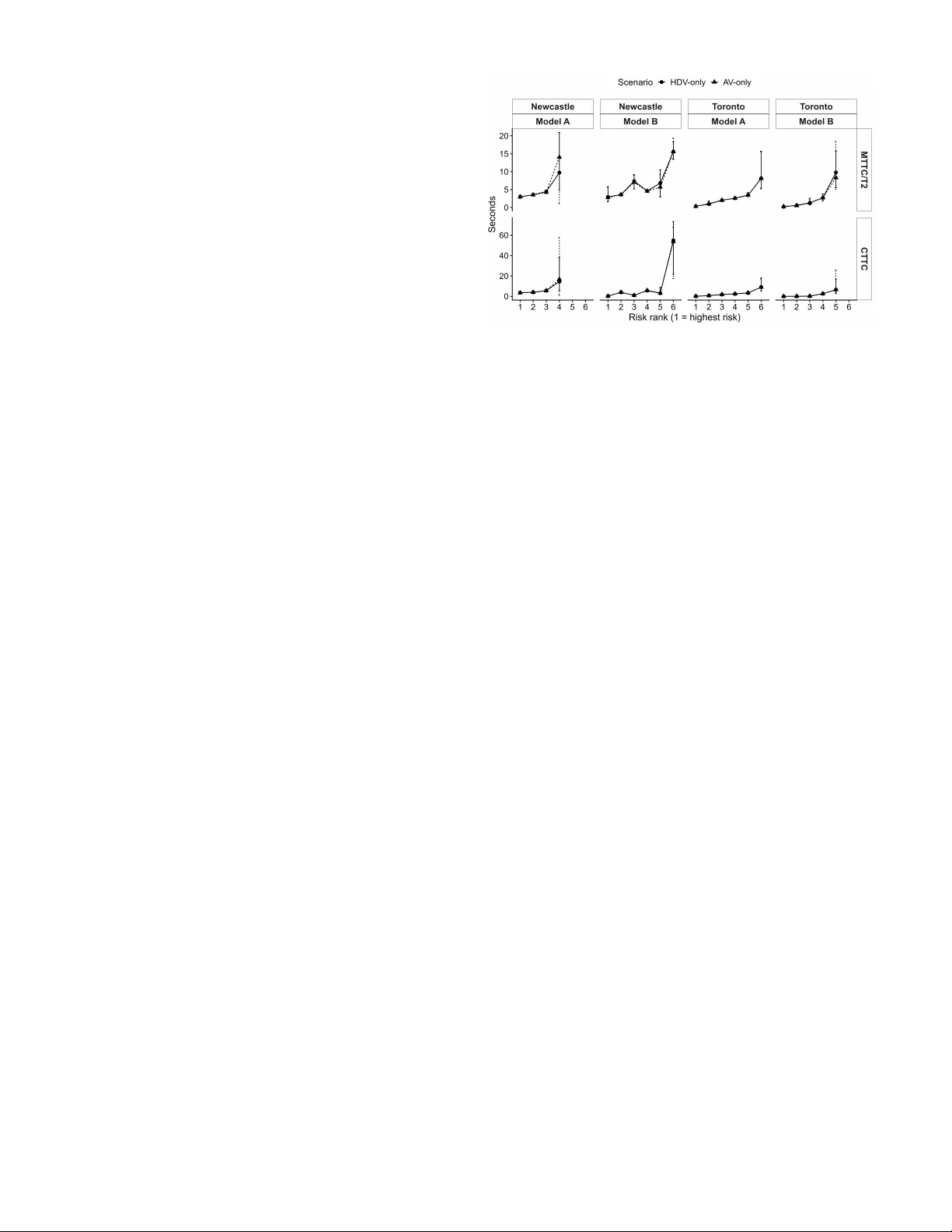
각 세션은 ‘가장 위험한 순간’을 두 지표 집합 중 하나의 최소값으로 정의한다. 모델 A는 MTTC 최소값과 해당 시점의 CTTC를, 모델 B는 T2 최소값과 해당 시점의 CTTC를 사용한다. 원시 값은 로그 변환 후 위치·모델별 평균·표준편차로 표준화(z‑점수)하여 오른쪽 꼬리 왜곡을 완화하고 비교 가능하게 만들었다.
잠재 프로파일 분석(LPA)은 각 위치별로 독립적으로 수행되었다. K=1부터 Kmax까지의 군집 수 후보를 BIC, 엔트로피, 최소 프로파일 비중(5% 이하 제외) 등을 기준으로 평가했으며, 최종적으로 뉴캐슬에서는 모델 A에서 K=4, 모델 B에서 K=6, 토론토에서는 모델 A에서 K=6, 모델 B에서 K=5가 선택되었다. 엔트로피는 0.86~0.96 사이로, 특히 뉴캐슬과 토론토 모델 A는 0.95 이상으로 프로파일 구분이 명확했다. 평균 최대 사후 확률도 0.91~0.99로 높은 할당 신뢰도를 보였다.
프로파일은 위험도 순으로 랭크되었으며, ‘복합 심각도 점수’를 이용해 Top‑1(가장 위험)과 Top‑2(상위 두 위험) 프로파일의 비중을 계산했다. 뉴캐슬에서는 AV‑only 세션이 Top‑2 프로파일에 13~14%p(95% CI) 더 많이 할당되었고, 모델 B에서는 Top‑1에서도 8%p의 유의한 차이가 있었다. 이는 AV가 보행자에게 더 작은 시간 여유를 제공하거나, 보행자가 AV의 의도를 오해해 위험한 간격을 선택할 가능성을 시사한다. 반면 토론토에서는 모든 대비에서 차이가 0에 가까워 통계적으로 구분되지 않았다(Δp 0.0~0.02, 95% CI 포함 0).
연구는 두 모델 간 차이도 조명한다. MTTC 기반 모델 A는 충돌 코스에 국한돼 급박한 상황을 강조하고, T2 기반 모델 B는 비충돌 근접 상황까지 포착한다. 따라서 모델 B가 뉴캐슬에서 더 큰 AV‑HDV 차이를 보인 것은 AV가 비충돌 상황에서도 보행자에게 불확실성을 야기한다는 점을 강조한다.
한계점으로는 (1) 위치별 독립 분석으로 프로파일 간 직접 비교가 제한적이며, (2) 최소값만 사용해 위험의 시간적 변동성을 충분히 반영하지 못함, (3) VR 환경이 실제 도로와 차이가 있어 외생 변수 통제에 한계가 있음 등을 들었다.
결론적으로, 다중 대리 안전 지표를 결합한 잠재 위험 프로파일은 보행자‑차량 상호작용의 이질성을 정량화하는 강력한 도구임을 입증했다. 특히 AV 도입이 지역적 맥락에 따라 위험 프로파일 분포를 변화시킬 수 있음을 실증적으로 보여주어, 정책 입안자와 교통 설계자가 eHMI 등 안전 인터페이스를 설계할 때 지역 특성을 고려한 위험 관리 전략을 수립하는 데 중요한 근거를 제공한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기