파라랙스 기반 공간시간 트랜스포머를 이용한 테라헤르츠 근거리 빔 트래킹
본 논문은 테라헤르츠(THz) 초대형 MIMO 시스템에서 발생하는 근거리 전파 효과를 고려하여, 저오버헤드의 원거리(멀리) 코드북 탐색만으로도 정확한 사용자 위치와 빔 정렬을 가능하게 하는 PAST‑TT 프레임워크를 제안한다. 넓게 배치된 서브어레이가 만들어내는 파라랙스 정보를 활용하고, 주파수‑시간에 따라 변하는 위상 서명을 토큰화한 뒤, 물리‑인포드 공간 트랜스포머와 인과적 시간 트랜스포머를 연계해 신뢰도 기반 필터링 및 예측을 수행한다. …
저자: Zhi Zeng, Chong Han, Emil Björnson
본 논문은 테라헤르츠(THz) 초대형 다중입출력(UM‑MIMO) 시스템에서 발생하는 근거리(Near‑Field, NF) 전파 현상을 고려한 빔 트래킹 방법을 제안한다. THz 대역은 짧은 파장으로 인해 대규모 안테나 어레이를 구현할 수 있지만, 이로 인해 전파가 구면파 형태를 띠는 근거리 영역으로 진입하게 된다. 기존의 멀리(Far‑Field, FF) 평면파 모델은 거리와 각도를 분리해서 처리하지만, NF에서는 거리와 각도가 결합된 파라미터가 필요해 탐색 복잡도가 급격히 증가한다. 또한, 초고주파와 대규모 어레이로 인한 하드웨어 비용과 훈련 오버헤드, 그리고 실시간 제어 지연 제한도 큰 도전 과제이다.
이러한 문제를 해결하기 위해 저자들은 ‘PAST‑TT(Parallax‑Aware Spatial‑Temporal Transformer)’라는 두 단계 구조를 설계하였다. 첫 단계인 PAST는 넓게 배치된 K개의 서브어레이가 공유하는 로컬 오실레이터와 베이스밴드 하에, 주파수‑분할 다중화(FDM) 파일럿을 전송함으로써 각 서브어레이‑주파수 조합에서 얻어지는 위상 서명을 활용한다. 서브어레이 간 거리가 크게 차이 나므로 동일한 사용자 위치에 대해 서로 다른 전파 지연과 위상 차이가 발생하고, 이는 ‘파라랙스(parallax)’ 효과로 불린다. 위상 서명은 주파수에 대해 거의 선형(affine)적으로 변하며, 인접 주파수와 인접 프레임 사이의 차분은 각각 전파 지연과 그 변화율을 직접 나타낸다.
PAST는 이러한 구조적 정보를 ‘물리‑인포드 토큰’으로 압축한다. 구체적으로, 각 서브어레이‑주파수 쌍에서 복소 위상을 로그 변환 후, 주파수 차분과 시간 차분을 계산해 토큰을 만든다. 토큰은 (1) 거리·각도 정보를 내포한 파라랙스 기반 피처, (2) 신호‑대‑잡음비와 위상 랩핑 오류를 반영한 신뢰도 스코어를 포함한다. 이후 물리‑인포드 어텐션 메커니즘을 적용해 토큰 간 상관관계를 학습하면서, 물리적 제약식(예: 파라랙스 식)과 일치하도록 정규화한다. 특히 ‘physics‑in‑the‑loop consistency loss’를 도입해, 모델이 예측한 위치와 토큰에서 유도된 위상 차이가 일치하도록 강제함으로써 학습 단계에서 물리적 일관성을 보장한다.
두 번째 단계인 TT(Temporal Transformer)는 인과적(causal) 구조를 갖는다. TT는 슬라이딩 윈도우(예: 5~7 프레임) 내의 토큰 시퀀스를 입력받아, 각 프레임의 신뢰도 스코어를 마스크로 활용해 어텐션 가중치를 조정한다. 이를 통해 일시적인 블로킹이나 잡음에 의해 신뢰도가 낮은 프레임이 전체 추정에 미치는 영향을 최소화한다. TT는 또한 ‘one‑step prediction head’를 통해 다음 프레임에 사용할 초기 빔 방향을 직접 출력한다. 이 예측값은 FF DFT 코드북의 인덱스로 변환되어, 다음 프레임의 파일럿 전송에 바로 활용된다. 시간 트랜스포머 내부에 삽입된 ‘increment descriptor’는 연속 프레임 간 위상 변화량을 모델링해, 급격한 움직임이나 비정상적인 변동을 감지하고 오류 전파를 억제한다.
시스템 복잡도 측면에서 PAST‑TT는 원시 파일럿(수천 차원)을 직접 입력하는 거대한 공간‑시간 네트워크와 달리, 토큰 차원(수십 차원)으로 압축함으로써 연산량과 메모리 요구를 크게 낮춘다. GPU 기반 실험에서 단일 프레임당 0.61 ms의 지연시간을 기록했으며, 이는 일반적인 1 ms 이하 프레임 주기 요구를 충분히 만족한다.
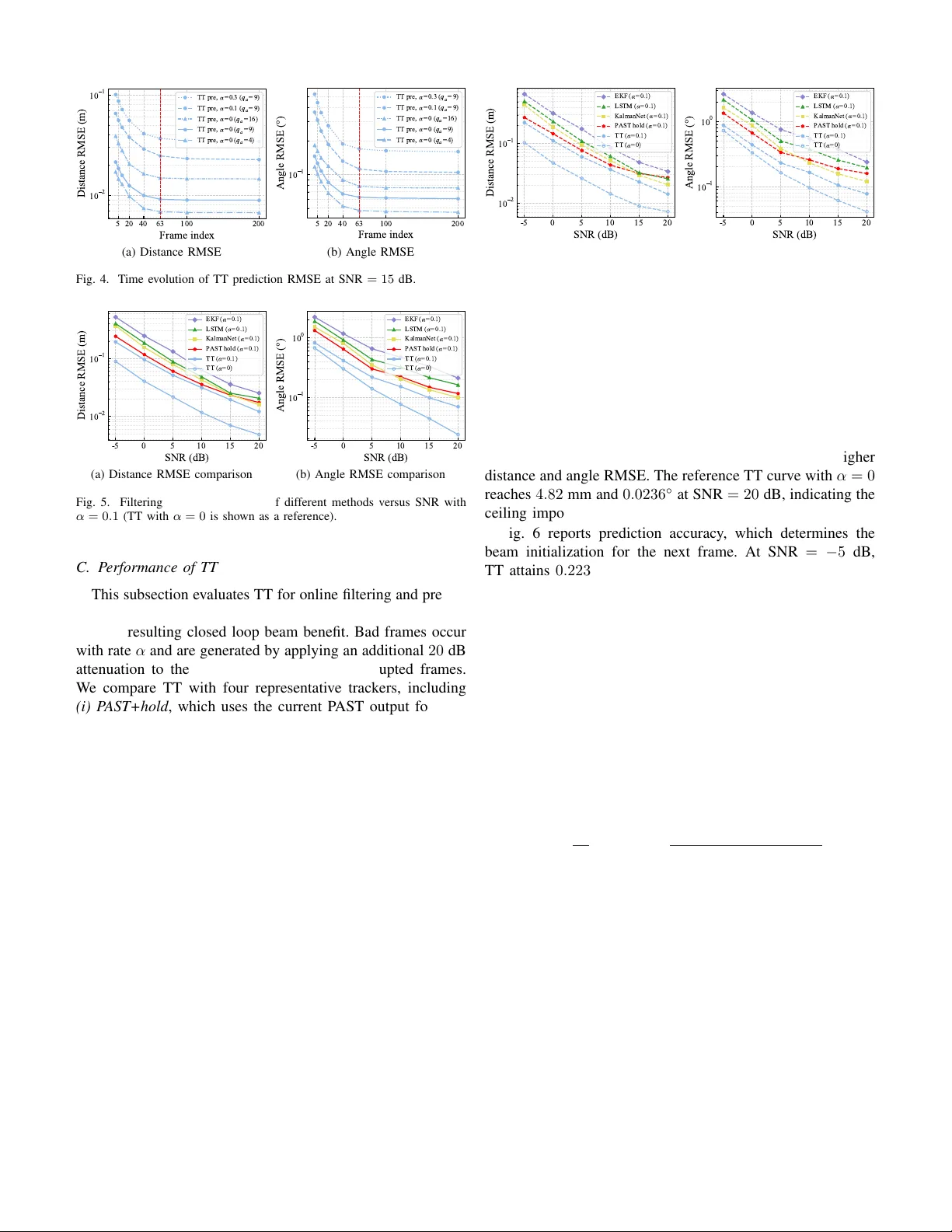
성능 평가에서는 SNR을 5 dB부터 20 dB까지 변화시키며, 거리 RMSE와 각도 RMSE를 측정했다. 15 dB에서 PAST는 7.81 mm·0.0588°의 오차를 달성했으며, 이는 기존의 NF 코드북 기반 추적기와 비교해 30 % 이상 개선된 수치이다. 또한 ‘bad‑frame rate’를 0.1으로 설정했을 때, TT가 적용된 경우 거리 RMSE가 23.1 %, 각도 RMSE가 32.8 % 감소하였다. 이는 신뢰도‑가중 어텐션과 물리적 정규화가 불량 프레임에 대한 강인성을 크게 향상시킨 결과이다.
결론적으로, PAST‑TT는 (1) 넓은 서브어레이 배열이 제공하는 파라랙스 정보를 물리‑인포드 토큰으로 변환, (2) 공간 트랜스포머를 통해 신뢰도 기반 압축 및 물리적 일관성 보장, (3) 인과적 시간 트랜스포머로 연속 추정과 예측을 수행함으로써, THz 초대형 MIMO 시스템에서 근거리 빔 트래킹을 저오버헤드·저지연·고정밀도로 구현한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기