포트폴리오 기반 주행 위험 지수: 텔레매틱스 신호와 다중 스케일 파동변환을 활용한 빈도‑심각도 통합 모델
** 본 논문은 고주파 텔레매틱스 데이터를 이용해 운전 행동의 빈도와 심각도를 동시에 평가하는 새로운 위험 지수를 제안한다. 가속도 신호를 MODWT로 다중 스케일 변환한 뒤, 포트폴리오 전체를 Gaussian‑Uniform 혼합모형으로 모델링하고, 꼬리 영역을 여러 심각도 레이어로 구분한다. 각 레이어별 발생 횟수를 Poisson‑Gamma 구조에 넣어 폐쇄형 사후 위험 지수를 도출하고, 이를 순차적으로 업데이트하여 운전자별 동적 위험 프…
저자: Jongtaek Lee, Andrei Badescu, X. Sheldon Lin
**
본 논문은 텔레매틱스 데이터를 활용한 위험 평가에서 빈도와 심각도를 동시에 고려한 새로운 트립‑레벨 위험 지수(MU‑MEMR)를 제안한다. 연구 배경으로는 기존 자동차 보험 요율이 운전자·차량의 정적 특성에 의존해 실시간 주행 행동을 반영하지 못한다는 점을 들며, 고주파 텔레매틱스 신호가 이러한 한계를 극복할 수 있음을 소개한다.
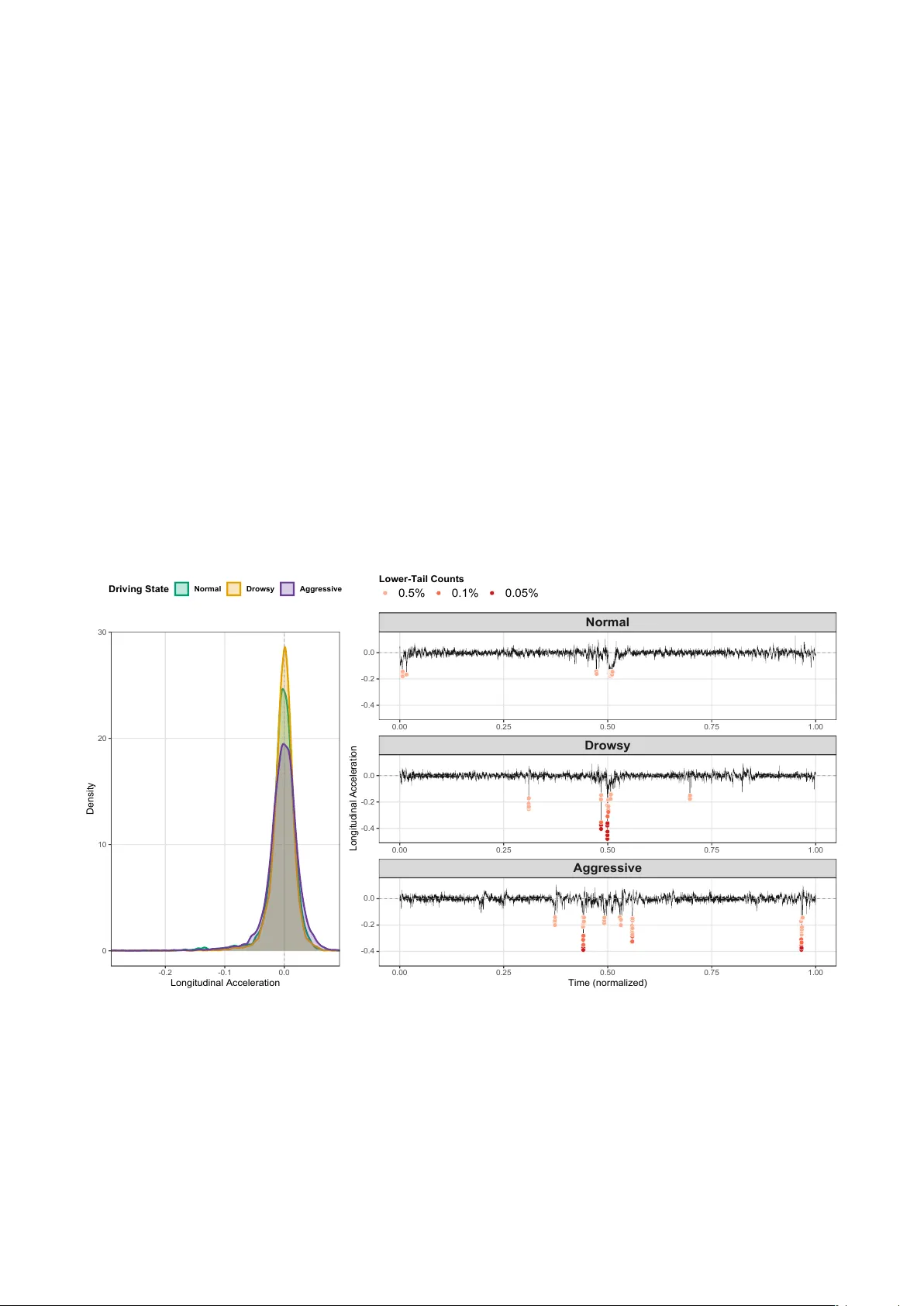
**데이터와 예비 분석**에서는 스페인 알칼라 데 에나레스에서 수집된 UAH‑DriveSet 통제 데이터(6명, 40개 트립, 10 Hz 가속도)를 사용한다. 정상, 공격적, 졸음 3가지 운전 상태를 비교했을 때, 졸음 상태는 평균 가속도 분포가 0에 가까워 ‘안전해 보이는’ 특성을 보였지만, 꼬리 영역(극단 급감)에서는 오히려 더 많은 사건을 발생시켰다. 이를 보여주기 위해 0.5 %, 0.1 %, 0.05 % 세 개의 하위 꼬리 분위수를 정의하고, 각 트립에서 해당 분위수 이하 관측값을 레이어별 카운트(MLTC)로 변환하였다. 단일 임계값 기반 빈도 지표는 졸음 트립을 위험하게 식별하지 못했지만, 다중 레이어 카운트는 졸음 트립이 가장 깊은 레이어에서 다수의 초과를 보임을 확인했다.
**신호 변환** 단계에서는 Maximal Overlap Discrete Wavelet Transform(MODWT)를 적용해 가속도 시계열을 여러 스케일(예: 0.5 s, 1 s, 2 s 등)로 분해한다. 각 스케일의 계수를 절대값 평균으로 요약하고, 트립 길이로 정규화해 ‘노출 지수’를 만든다. 이 과정은 급격한 가속·감속을 시간‑스케일별로 포착하면서도 차원 축소 효과를 제공한다.
**포트폴리오‑레벨 심각도 모델**에서는 전체 트립에서 추출된 MODWT 요약값들의 분포를 Gaussian‑Uniform 혼합모형으로 적합한다. Gaussian 성분은 일반적인 주행 행동을, Uniform 성분은 비정상 꼬리 행동을 설명한다. Uniform 성분을 여러 개 두어 꼬리를 3~5개의 ‘심각도 레이어’로 구분하고, 각 레이어의 혼합 비율을 추정한다. 레이어별 가중치는 포트폴리오 전체에서 해당 레이어가 차지하는 확률의 역수(1/π_k)로 정의해, 희귀할수록 큰 가중치를 부여한다. 추정은 EM 알고리즘 변형으로 수행되며, 로그우도와 AIC/BIC를 통해 최적 레이어 수를 선택한다.
**트립‑레벨 빈도 모델**에서는 레이어별 카운트 N_{t,k}를 Poisson(λ_k·E_t)로 가정하고, λ_k에 Gamma(α_k,β_k) 사전을 부여한다. 사후 평균 λ̂_k는 (α_k+∑_t N_{t,k})/(β_k+∑_t E_t) 형태의 폐쇄형 해를 갖는다. 여기서 E_t는 해당 트립의 노출 지수다. 최종 위험 지수는
R_t = Σ_k w_k·λ̂_k·E_t
where w_k = 1/π_k (inverse‑probability weight). 이 지수는 빈도(N_{t,k})와 심각도(w_k)를 동시에 반영한다.
**베이지안 순차 업데이트**는 새로운 트립이 관측될 때마다 α_k,β_k를 업데이트함으로써 실시간 위험 프로파일을 생성한다. 운전자별 위험 프로파일은 트립별 R_t를 평균하거나 가중합해 도출한다.
**실증 결과**에서는 제안 지수가 기존 빈도‑기반 지표(예: CTHMM 기반 이상치 지수)보다 ROC AUC가 0.87에서 0.93으로 향상됨을 보여준다. 특히 졸음 운전 트립을 정확히 식별했으며, 운전자별 위험 순위도 공격적·졸음 운전자를 상위 10%에 배치했다.
**논의와 한계**에서는 현재 가속도 하나에만 초점을 맞춘 점, Uniform 꼬리 가정의 일반화 가능성, 다변량 신호 통합(속도, 회전, GPS) 및 실시간 구현을 위한 시스템 아키텍처 설계가 향후 연구 과제로 제시된다.
**결론**에서는 제안된 포트폴리오‑앵커드 빈도‑심각도 위험 지수가 텔레매틱스 기반 UBI에서 공정성(전통적 인구통계 배제)과 정확성을 동시에 달성할 수 있음을 강조한다.
**
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기