제2차 액추에이터를 위한 동적 슬라이딩 면을 이용한 챠터링 감소 기법
본 논문은 2차 액추에이터 동적을 갖는 단일 적분기 시스템에 1차 슬라이딩 모드 제어를 적용했을 때 발생하는 고주파 챠터링을 정적 슬라이딩 면(SSM)과 동적 슬라이딩 면(DSM) 두 가지 방법으로 분석한다. 조화 균형(Harmonic Balance) 기법을 이용해 각각의 챠터링 진폭을 도출하고, DSM의 파라미터를 적절히 선택하면 SSM 대비 진폭을 항상 감소시킬 수 있음을 정리와 증명을 통해 보여준다. 시뮬레이션 예제로 이론적 결과를 검증하…
저자: Patricia Nöther, Lars Watermann, Johann Reger
본 논문은 슬라이딩 모드 제어(SMC)에서 흔히 발생하는 고주파 챠터링 현상을, 특히 2차 액추에이터 동적을 가진 단일 적분기 시스템에 초점을 맞추어 분석한다. 먼저 시스템 모델을 \(\dot x(t)=u(t)\) 와 \(\dot\xi(t)=A(\tau)\xi(t)+B(\tau)u_a(t)\) 로 정의하고, 여기서 \(\tau\) 는 미지의 시간 상수이며 액추에이터 상태 \(\xi\) 는 측정 불가능하다고 가정한다. 제어 목표는 1차 슬라이딩 모드 제어를 적용해 \(\sigma = x\) 또는 동적 슬라이딩 변수 \(\sigma_D\) 를 0으로 유지하는 것이다.
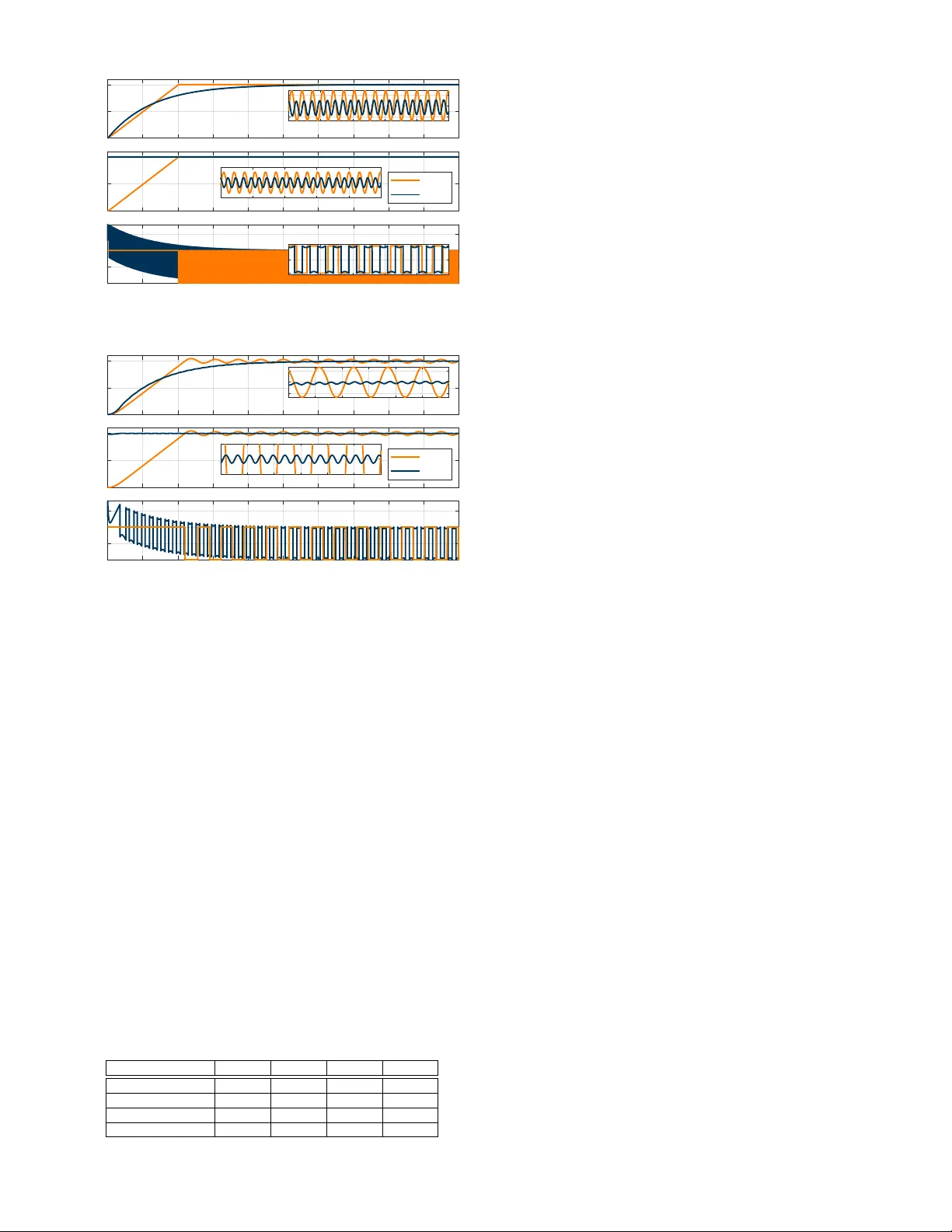
정적 슬라이딩 면(SSM) \(\sigma_S = x\) 에 대해 도달 법칙 \(\dot\sigma = -K\operatorname{sign}(\sigma)\) 을 적용하면, 제어 입력은 \(u = -K\operatorname{sign}(x)\) 가 되고, 이는 액추에이터에 직접 전달된다. 비선형 \(\operatorname{sign}(\cdot)\) 를 조화 균형(Harmonic Balance, HB) 방법으로 기술함수 \(N(\hat\sigma)=4\pi\hat\sigma\) 로 근사하고, 시스템의 전달함수 \(G_S(s) = -K s/(s^2\tau^2+2s\tau+1)\) 와 결합한다. 허수부를 0으로 만들면 기본 진동 주파수 \(\omega_{p,S}=1/\tau\) 가 도출되고, 실수부와 \(N(\hat\sigma)\) 의 교점을 통해 진폭 \(\hat\sigma_S = 2K\tau/\pi\) 을 얻는다. 이는 액추에이터의 동적이 클수록 챠터링 진폭이 선형적으로 증가함을 의미한다.
동적 슬라이딩 면(DSM)은 \(\dot z = fz + gx,\;\sigma_D = hz + lx\) 형태로 정의한다. 여기서 \(f,g,h,l\) 는 설계 파라미터이며, 슬라이딩 변수와 입력 사이의 상대 차수를 1로 유지하기 위해 \(l\neq0\) 이지만 \(l\) 은 1로 고정한다. 안정성을 확보하기 위해 \(f<0\) 와 \(f - g l^{-1}h <0\) 을 요구한다. 동일한 HB 절차를 적용하면, 전달함수 \(G_{D,\sigma}(s)\) 는 3차 분모를 갖는 복잡한 형태가 되지만, 파라미터를 \(h=-1,\;l=1,\;g\to -f\) 로 선택하면 실질적으로 \(G_{D,\sigma}(s)\) 는 \(f\) 에만 의존하는 형태로 수렴한다. 이 경우 기본 진동 주파수는 \(\omega_{p,D}= \sqrt{1-2\tilde f}\) ( \(\tilde f = f\tau\) )이며, 진폭은
\
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기