실시간 운전자 안전 점수화: 역충돌 확률 모델링으로 보는 새로운 패러다임
본 논문은 기존 이진 충돌 예측 모델을 연속형 0‑100 안전 점수로 변환하는 SafeDriver‑IQ 프레임워크를 제안한다. 국가 수준 NHTSA 충돌 기록과 Waymo 자율주행 데이터셋을 결합해 VRU(보행자·자전거 이용자) 위험을 정량화하고, 도메인 기반 보정 레이어와 SHAP 해석을 통해 실시간, 설명 가능한 안전 인텔리전스를 제공한다. 실험 결과 0.833 ROC‑AUC와 75.8% 정확도를 달성했으며, 위험 요인 4개 이상이 동시에 …
저자: Joyjit Roy, Samaresh Kumar Singh
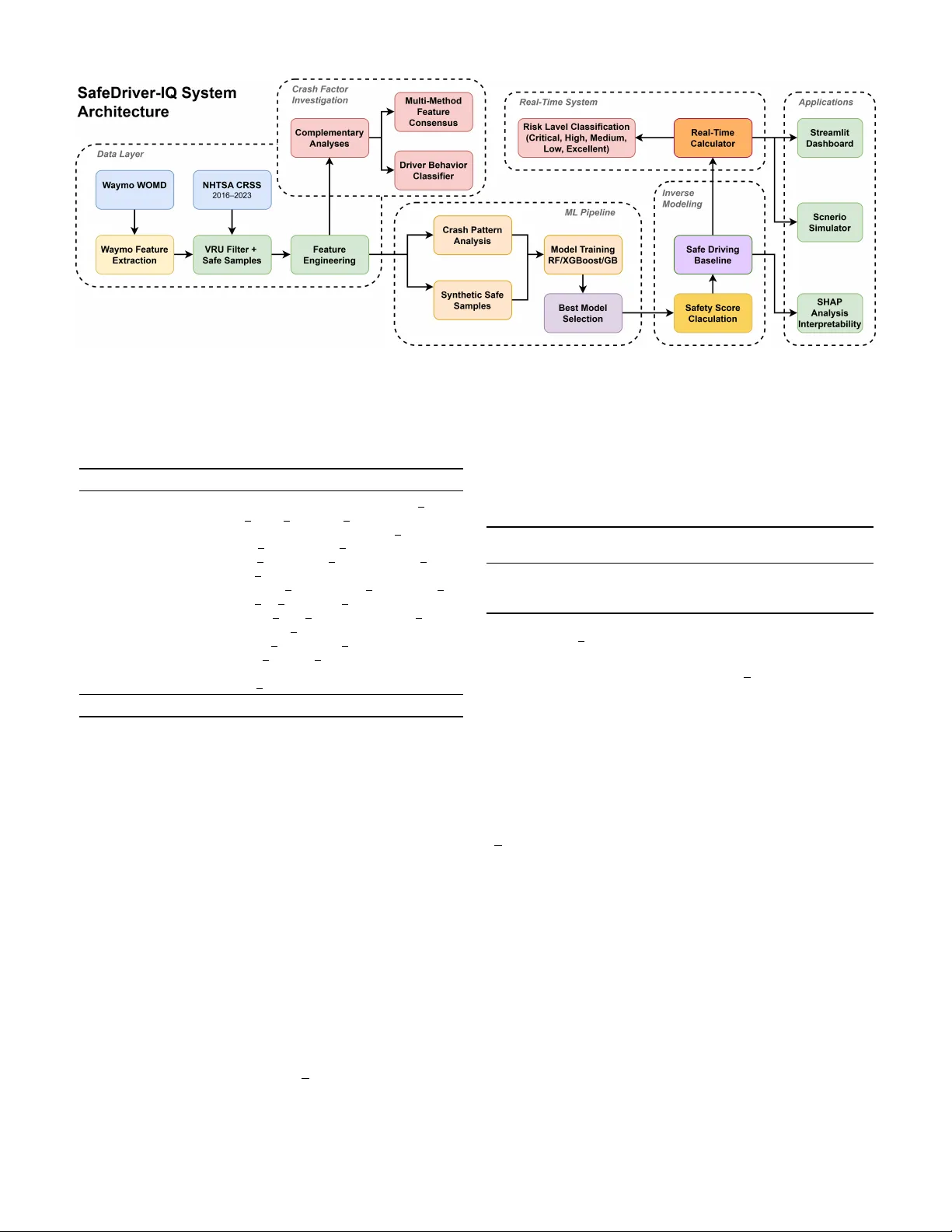
본 논문은 “Real‑Time Driver Safety Scoring Through Inverse Crash Probability Modeling”이라는 제목으로, 기존 이진 충돌 예측 모델이 제공하는 제한된 정보(충돌 여부) 대신 연속적인 안전 점수를 제공하는 SafeDriver‑IQ 프레임워크를 제안한다. 연구 배경으로는 전 세계적으로 교통 사고 사망자가 매년 1백만 명에 달하고, 특히 보행자·자전거 이용자(VRU)의 사망 비중이 증가하고 있다는 점을 들며, 현재 차량 중심 안전 기술이 VRU 보호에 한계가 있음을 지적한다.
프레임워크는 크게 네 단계로 구성된다. 첫째, 데이터 수집 단계에서는 NHTSA Crash Report Sampling System(CRSS)과 Waymo Open Motion Dataset(WOMD)을 결합한다. CRSS는 2016‑2023년 미국 전역의 417,335건 충돌 레코드를 제공하지만, 충돌만 포함하고 있어 안전 운전 샘플이 부족하다. 이를 보완하기 위해 WOMD에서 10 Hz, 9.1 s 길이의 다중 에이전트 궤적을 추출하고, 충돌·근접 충돌·안전 운전 시나리오를 구분한다. 두 데이터셋을 VRU 필터링 후 23,194건의 보행자·자전거 충돌 레코드와 동일 수량의 합성 안전 샘플을 만들어 1:1 비율(46,388건)의 균형 잡힌 학습 데이터를 만든다. 합성 안전 샘플은 조명, 날씨, 도로 상태 등을 개선해 생성한다.
둘째, 특징 엔지니어링 단계에서는 원시 120여 개 변수를 64개의 숫자형 특징으로 축소하고, 시간, 환경, 위치, VRU‑특화, 상호작용, 충돌·차량, 메타데이터 7개 그룹으로 정리한다. 특히 “밤·어두운”, “주말·밤”, “악천후”와 같은 상호작용 변수를 도입해 위험 요인의 비선형 복합 효과를 포착한다.
셋째, 모델 학습 단계에서는 Random Forest(RF), XGBoost(XGB), Gradient Boosting(GB) 세 가지 앙상블을 100개의 트리와 3번의 랜덤 시드로 비교한다. 평가 지표는 ROC‑AUC와 정확도이며, RF가 테스트 ROC‑AUC 0.833, 정확도 75.8%로 가장 우수해 최종 모델로 선정된다. 훈련‑테스트 정확도 차이가 0.80%에 불과해 과적합 위험이 낮음을 확인한다.
넷째, 역충돌 모델링 단계에서는 학습된 이진 분류기의 “비충돌” 확률 P(y=0|x)를 0‑100 점수로 스케일링한다. 수식 S_raw(x)=P(y=0|x)×100은 점수가 0이면 충돌 패턴과 거의 동일, 100이면 완전 안전을 의미한다. 이 연속 점수는 위험의 정도를 정량화하고, 실시간 피드백에 적합하도록 설계되었다.
해석 가능성을 위해 저자는 TreeSHAP, permutation importance, RF 내장 중요도, XGBoost gain을 모두 적용해 특징 중요도 합의를 도출하고, SHAP 값을 실시간 점수와 연계해 “왜 점수가 낮은가”를 시각화한다. 예를 들어, 저조도·악천후 조합이 점수를 크게 낮추는 주요 요인임을 구체적으로 제시한다.
위험 요인 분석 결과, 전체 충돌의 87%가 두 개 이상 위험 요인의 동시 발생으로 설명되며, 다중 요인 복합 효과가 베이스라인 대비 4.5배 위험 상승을 초래한다는 비선형 관계를 확인했다. K‑means 클러스터링을 통해 “고속·과속”, “불법 차선 변경”, “음주·약물”, “과다 급제동” 등 네 가지 운전자 프로파일을 도출하고, 각 프로파일별 평균 안전 점수를 제공한다.
응용 측면에서는 ADAS, 플릿 관리, 도시 인프라 설계에 활용 가능성을 논의한다. 실시간 안전 점수와 SHAP 기반 설명은 운전자에게 즉각적인 행동 교정 피드백을 제공하고, 교통 관리자는 위험 구역을 사전 식별해 인프라 개선을 계획할 수 있다.
한계점으로는 합성 안전 샘플 생성 과정에서 인위적 가정이 포함돼 실제 운전 행동과 차이가 있을 수 있으며, VRU 감지 센서와 결합한 실시간 데이터 스트리밍 검증이 부족하다는 점을 언급한다. 향후 연구에서는 실제 차량에 실시간 적용 테스트와 다양한 지역·기후 조건에 대한 일반화 검증이 필요하다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기