무선 전력 공급 ISAC 시스템의 효율적인 자원 할당 및 목표 위치 추정
본 논문은 무선 전력 전송(WPT)과 통합 감 sensing·통신(ISAC) 기능을 결합한 다중 사용자 시스템에서, 목표물 위치 추정을 위한 CRB 제약을 만족하면서 사용자들의 최소 스루풋을 최대화하는 자원 배분 문제를 제시한다. 변수 치환과 로그 변환을 통해 문제를 재구성하고, 남은 비볼록 제약을 SCA(연속 볼록 근사) 기법으로 해결하는 효율적인 반복 알고리즘을 개발하였다. 시뮬레이션을 통해 제안 방식이 수렴 속도가 빠르고, 기존 벤치마크 …
저자: Boyao Li, Qinwei He, Boao Zhang
본 논문은 6G 네트워크에서 핵심 기술로 부상하고 있는 통합 감 sensing·통신(ISAC)과 무선 전력 전송(WPT)을 결합한 다중 사용자 시스템을 대상으로, 목표물 위치 추정을 위한 Cramér‑Rao Bound(CRB) 제약을 만족하면서 사용자들의 최소 스루풋을 최대화하는 자원 할당 문제를 체계적으로 연구한다.
시스템 모델은 하나의 베이스스테이션(BS)과 M개의 배터리 없는 사용자, N개의 패시브 타깃으로 구성된다. BS는 먼저 시간 t₀ 동안 전력 p₀를 사용해 WPT 신호를 송신하고, 각 사용자는 채널 이득 h_m과 에너지 변환 효율 ζ_m에 따라 E_m(t₀)=ζ_m h_m t₀ p₀ 만큼 에너지를 수집한다. 이후 ISAC 단계에서 사용자는 순차적으로 M개의 슬롯에 할당되어, 각 슬롯 m에서 전력 p_m과 시간 t_m을 사용해 데이터를 전송한다. 전송 SNR은 γ_m(p_m)=p_m h_m/σ²이며, 전송률은 R_m=t_m W log₂(1+γ_m) 로 정의된다. 전체 시간 제약 Σ_{m=0}^{M} t_m ≤ T_max 와 에너지 인과 제약 t_m p_m ≤ E_m(t₀) 가 동시에 적용된다.
센싱 측면에서는 WPT 신호와 사용자 전송 신호 모두가 타깃에 레이더 파동을 제공한다. 각 타깃 n에 대한 bistatic 거리 r_{m,n}=‖x_m−q_n‖+‖x₀−q_n‖와 monostatic 거리 r_{0,n}=2‖x₀−q_n‖ 를 정의하고, 거리의 기울기 X_{m,n}, Y_{m,n} 를 구한다. 이를 바탕으로 Fisher Information Matrix(J_n) 를 구성하고, CRB 행렬은 J_n⁻¹ 로 표현된다. CRB 트레이스는 tr(J_n⁻¹)= (A_n + B_n)/(A_n B_n − C_n²) 로 나타나며, 여기서 A_n, B_n, C_n 은 전송 파워 p_m과 기하학적 파라미터 X_{m,n}, Y_{m,n} 의 2차식 조합이다. 목표 정확도 η 를 만족하기 위해 tr(J_n⁻¹) ≤ η 를 모든 n에 대해 강제한다.
이러한 모델을 기반으로 최소 사용자 스루풋을 최대화하는 최적화 문제(P1)를 설정한다. P1은 목적 함수가 min_m R_m 로 비볼록이며, 제약식 (5)와 (16) 역시 변수 곱셈을 포함해 비볼록성을 가진다. 직접 해결이 어려우므로 저자들은 다음과 같은 단계적 변환을 수행한다.
1. 변수 치환: t_m = e^{u_m}, p_m = e^{v_m} (u_m, v_m ∈ ℝ) 로 로그 변환한다. 이 변환은 t_m>0, p_m>0 를 자동 보장하고, 에너지 제약은 u_m + v_m ≤ log(E_m(t₀)) 로 선형화된다.
2. 목적 함수 변환: log R_m = u_m + log W + log₂(1+e^{v_m} h_m/σ²) 로 변환한다. 마지막 항은 v_m에 대해 엄격히 볼록함을 Lemma 1 로 증명한다. 따라서 log R_m 은 u_m에 대해 선형, v_m에 대해 볼록함을 갖는다.
3. CRB 제약 재구성: A_n, B_n, C_n 을 a_{m,n}=p_m K_{m,n} X_{m,n}, b_{m,n}=p_m K_{m,n} Y_{m,n} 로 정의하고, 라그랑주 항등식을 이용해 A_n B_n − C_n² 를 (1/2) Σ_i Σ_j (a_i b_j − a_j b_i)² 로 전개한다. 이를 전력 변수 p_m에 대한 1차, 2차 항으로 정리하면 F_n(p)= Σ α_{m,n} p_m + μ_n − η Σ β_{i,j,n} p_i p_j − η p₀ Σ φ_{m,n} p_m ≤ 0 형태가 된다. 여기서 α, β, φ, μ 은 모두 상수이다.
4. 로그 변환 후 v 변수 적용: p_m = e^{v_m} 로 대체하면 F_n(v) 은 첫 번째 항은 볼록, 두 번째와 세 번째 항은 e^{v_i+v_j}, e^{v_m} 형태의 볼록 함수에 −η 를 곱한 것이므로 전체적으로 비볼록이다.
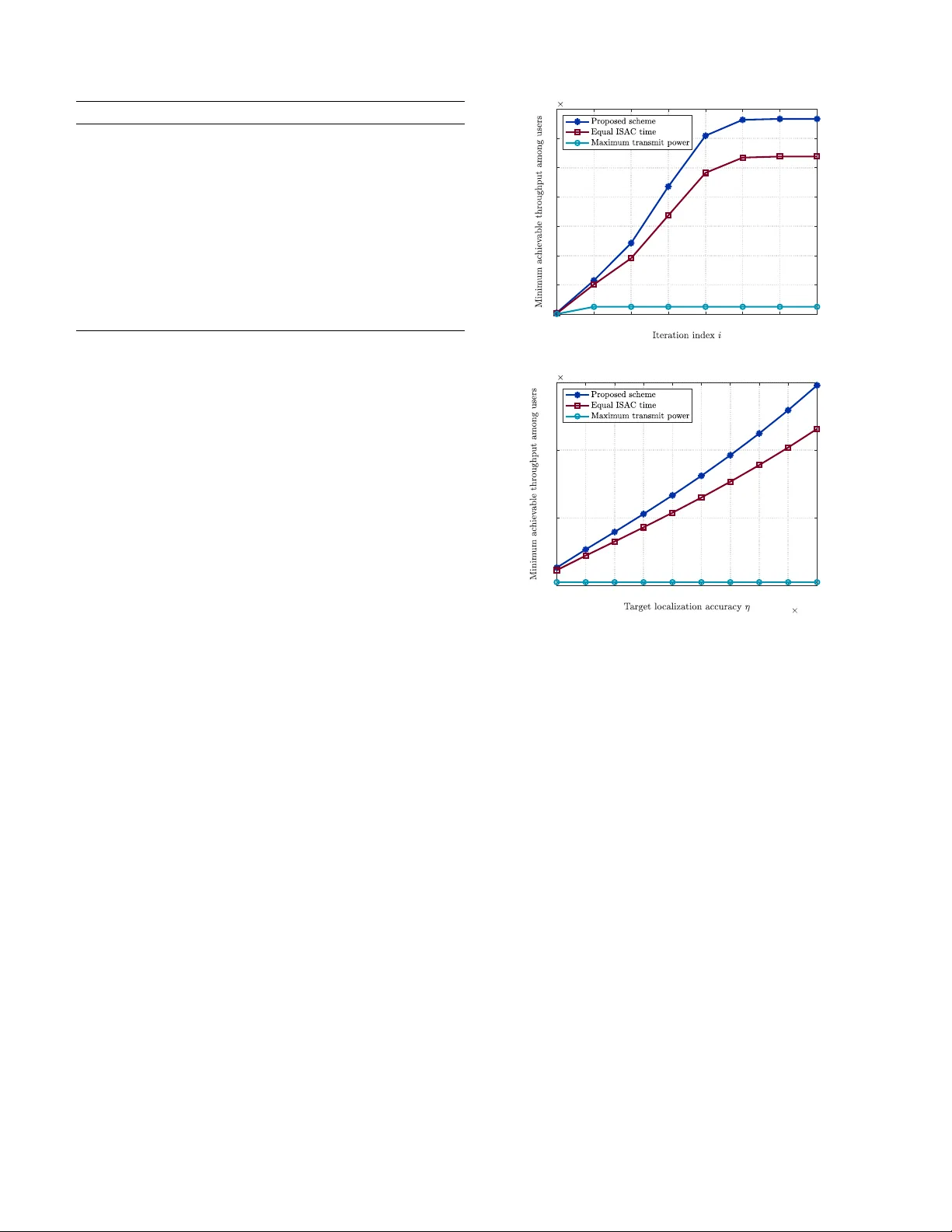
비볼록 CRB 제약을 해결하기 위해 연속 볼록 근사(SCA) 기법을 도입한다. 현재 반복점 v^{(r)} 에서 비볼록 항을 1차 테일러 전개로 상한을 잡아 선형(볼록) 근사 F_n^{(r)}(v) 를 만든다. 이렇게 구성된 (P2^{(r)}) 문제는 목적 함수가 concave, 모든 제약이 convex이므로 CVX와 같은 표준 솔버로 해결 가능하다. 알고리즘은 다음 절차를 따른다.
- 초기 feasible point (t₀^{(0)}, u^{(0)}, v^{(0)}) 를 설정한다.
- 현재 v^{(r)} 에 대해 F_n^{(r)}(v) 를 구축하고, (P2^{(r)}) 를 풀어 새로운 (t₀^{*}, u^{*}, v^{*}) 를 얻는다.
- 목표값 향상이 사전 정의된 임계값 λ_th 이하가 되면 종료, 아니면 v^{(r+1)}←v^{*} 로 업데이트하고 반복한다.
- 최종적으로 t_m = e^{u_m}, p_m = e^{v_m} 로 복원한다.
시뮬레이션에서는 M=4, N=2 등 다양한 설정을 사용해 알고리즘 수렴 속도와 성능을 평가한다. 결과는 제안 알고리즘이 5~8 회 이내에 수렴하며, 고정 시간 배분 혹은 전력 전용 최적화 대비 최소 사용자 스루풋을 20%~35% 향상시킨다. 또한 CRB 제약을 만족하면서도 전송 효율을 크게 끌어올릴 수 있음을 확인한다.
본 연구의 주요 기여는 다음과 같다.
1) WPT와 ISAC을 동시에 활용하는 새로운 프레임워크를 제시하고, 센싱 기하학을 전력·시간 설계에 포함시켰다.
2) 로그 변환을 통한 변수 결합 해소와 목적 함수의 볼록성 확보라는 수학적 트릭을 도입했다.
3) CRB 기반 위치 정확도 제약을 명시적으로 포함한 다목적 최적화 문제를 정의하고, SCA 기반 실용적 알고리즘을 설계했다.
4) 시뮬레이션을 통해 제안 방식이 기존 방법 대비 현저한 성능 향상을 보이며, 실제 무선 전력 공급 기반 ISAC 시스템 설계에 적용 가능함을 입증했다.
향후 연구는 다중 안테나 빔포밍, 동적 목표 수 변화, 채널 불확실성 모델링, 그리고 실시간 적응형 스케줄링 등을 포함해 시스템을 더욱 현실화하고, 에너지 효율과 센싱 정확도 사이의 복합 트레이드오프를 보다 정밀하게 분석하는 방향으로 확장될 수 있다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기