효율적인 심내막 기반 시공간 네트워크, Echo‑E³Net으로 실시간 EF 추정
초록
Echo‑E³Net은 심내막 경계와 위상 정보를 명시적으로 활용해 좌심실 박출률(LVEF)을 추정하는 경량 딥러닝 모델이다. 1.55 M 파라미터와 8.05 GFLOPs만으로 EchoNet‑Dynamic 데이터셋에서 RMSE 5.20, R² 0.82를 달성했으며, 사전 학습·데이터 증강·테스트 시 앙상블 없이 실시간 포커스 초음파(POCUS) 현장에 바로 적용할 수 있다.
상세 분석
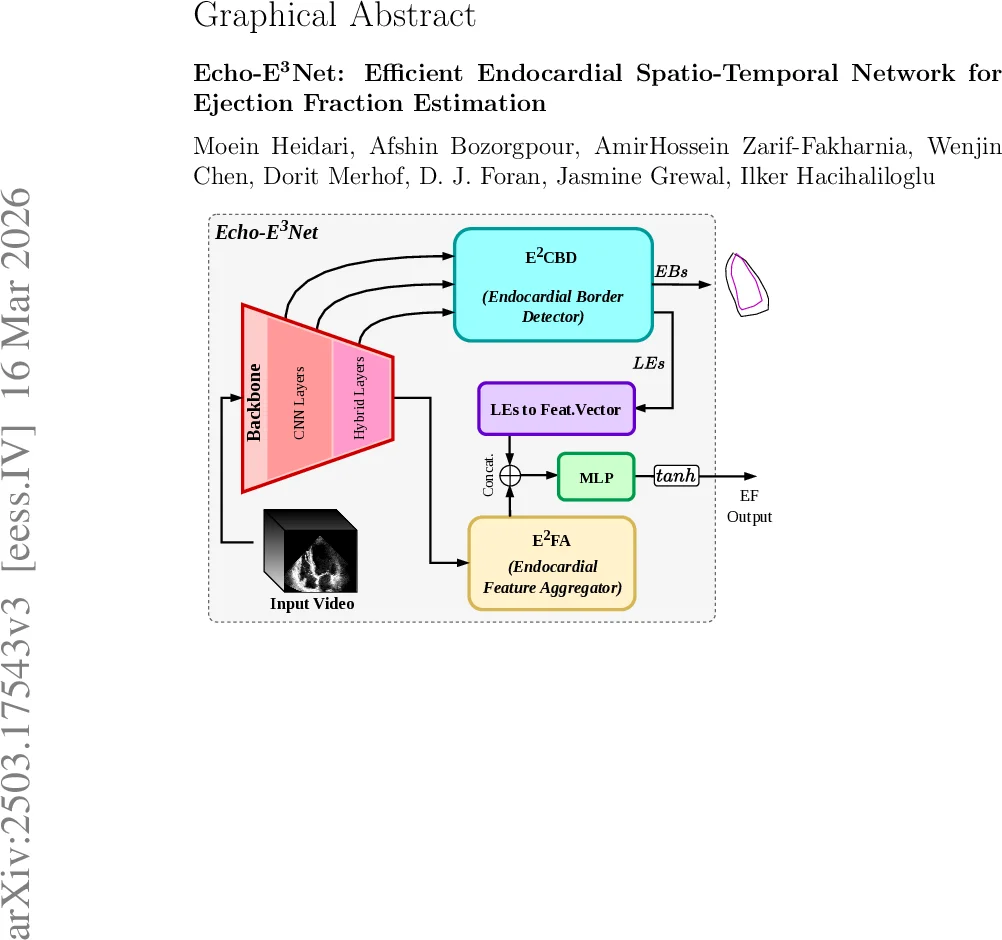
본 논문은 기존의 영상‑기반 LVEF 추정 방법이 전역적인 특징에 과도히 의존하고, 심내막(Endocardial) 경계의 위상(ED/ES) 정보를 충분히 활용하지 못한다는 점을 지적한다. 이를 해결하기 위해 두 개의 핵심 모듈, E²CBD와 E²FA를 설계하였다. E²CBD는 다중 스케일 토큰화된 3D 특징에 대해 위상‑특이적인 크로스‑어텐션을 적용해 ED와 ES 각각에 대한 랜드마크 쿼리를 생성한다. 각 쿼리는 32‑차원 임베딩을 통해 4개의 좌표(두 점)로 디코딩되며, 이는 Simpson’s biplane 방법에 기반한 기하학적 손실로 정규화된다. 이렇게 얻은 랜드마크 임베딩은 전역적인 심근 수축 정보를 담고 있어, 노이즈가 많은 POCUS 영상에서도 강인성을 제공한다.
E²FA는 백본(LHUNet)에서 추출한 가장 깊은 피처 맵에 대해 평균, 최대, 분산 세 가지 전역 통계량을 풀링하고, 이를 랜드마크 임베딩과 선형 변환 후 연결(concatenation)한다. 이 결합된 디스크립터는 가벼운 MLP 헤드에 입력되어 EF를 직접 회귀한다. 중요한 점은 Simpson 기반의 기하학적 손실이 학습 단계에서만 사용되며, 추론 시에는 순수 회귀값만을 출력한다는 점이다. 따라서 모델 복잡도는 크게 증가하지 않으면서도 임상적 근거와 일치하는 형태학적 제약을 학습한다.
효율성 측면에서 저자는 LHUNet의 인코더만을 피처 추출기로 활용하고, 토큰 수를 제한(N_max)해 메모리 사용을 최소화한다. 전체 파라미터는 1.55 M에 불과하고, 연산량은 8.05 GFLOPs로 모바일 GPU에서도 실시간(≈30 fps) 처리가 가능하다. 실험 결과 EchoNet‑Dynamic에서 기존 최첨단 모델 대비 파라미터·연산량은 5배 이상 감소했음에도 RMSE와 R²는 경쟁 수준을 유지한다. 특히 저EF(≤30 %) 구간에서 성능 저하가 적어, 임상적으로 중요한 저기능 환자군에 대한 신뢰성을 확보한다.
요약하면, Echo‑E³Net은 (1) 위상‑특이적인 크로스‑어텐션을 통한 정확한 심내막 랜드마크 검출, (2) 전역 통계와 랜드마크 임베딩의 효율적 결합, (3) Simpson‑inspired 차별화 가능한 기하학 손실을 통한 임상‑정합성 확보, (4) 경량 설계로 실시간 POCUS 적용 가능이라는 네 가지 혁신 포인트를 제공한다.
댓글 및 학술 토론
Loading comments...
의견 남기기