시뮬레이션 강화 로봇 내비게이션을 위한 대역폭 적응형 교차 현실 동기화
초록
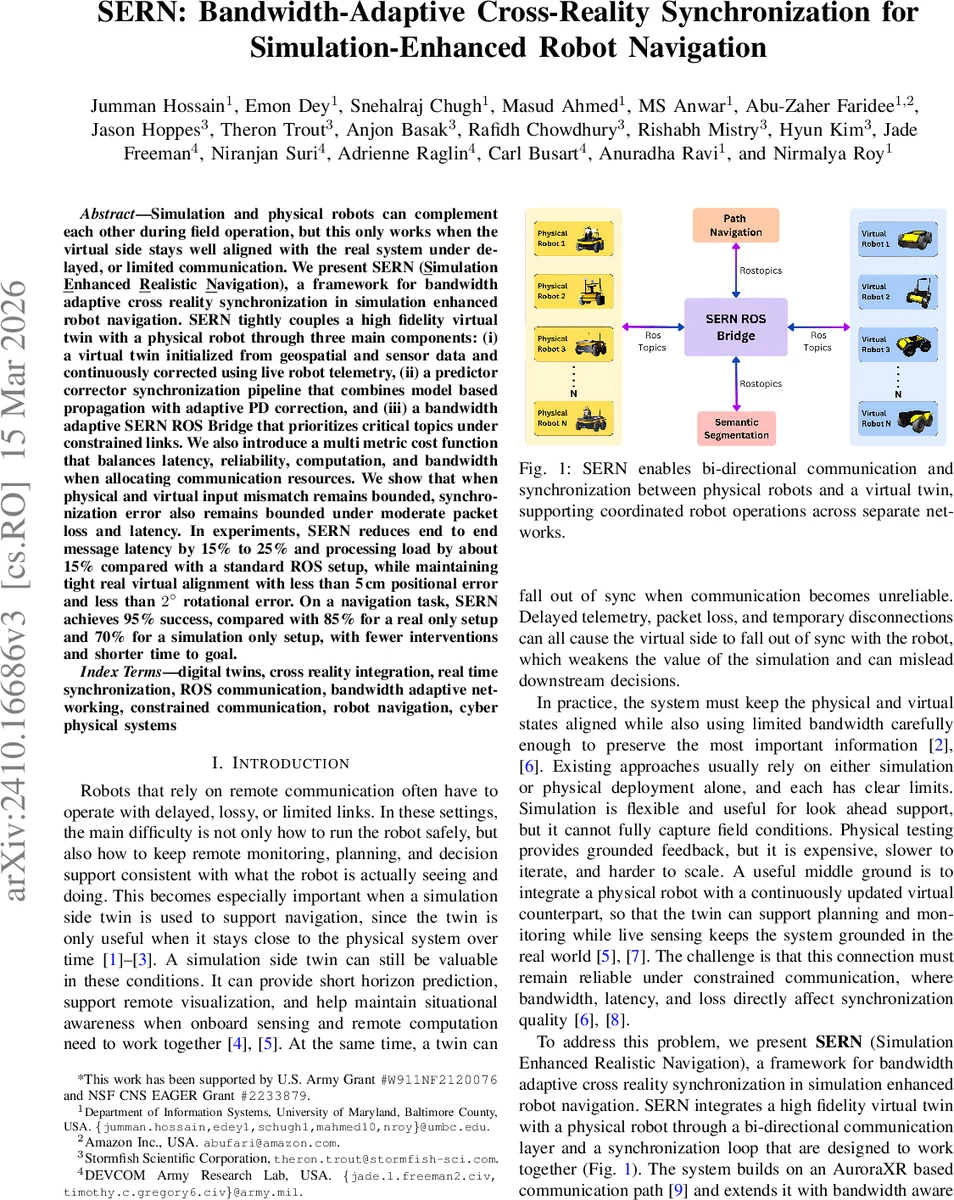
SERN은 고정밀 가상 트윈과 물리 로봇을 실시간으로 연결하는 프레임워크로, 예측 모델과 적응형 PD 제어를 결합한 동기화 파이프라인과 대역폭 제한 상황에서 중요한 ROS 토픽을 우선 전송하는 브리지를 제공한다. 실험 결과, 메시지 지연을 15‑25 % 감소시키고 처리 부하를 15 % 절감하면서 위치 오차 5 cm, 회전 오차 2° 이하를 유지하고, 내비게이션 성공률을 95 %까지 끌어올렸다.
상세 분석
SERN 논문은 전통적인 로봇 운영에서 시뮬레이션과 실제 로봇 간의 동기화가 통신 지연·손실·대역폭 제한에 의해 쉽게 깨지는 문제를 해결하고자 한다. 첫 번째 핵심 기여는 지리공간 데이터와 실시간 텔레메트리를 결합해 가상 트윈을 자동으로 초기화하고 지속적으로 보정하는 파이프라인이다. 여기서는 GPS 기반의 지오메트리 변환을 로컬 좌표계와 Unity 엔진 좌표계로 매핑하는 수식(1‑3)을 제시하고, 변화가 발생한 영역만을 패치 형태로 전송해 전체 씬을 매번 전송하는 비용을 크게 절감한다. 두 번째 기여는 예측‑보정(predictor‑corrector) 동기화 메커니즘이다. 물리 로봇의 상태가 일시적으로 통신이 끊기면 모델 기반 상태 전파(predictor)가 작동하고, 새 텔레메트리가 도착하면 적응형 PD 제어기로 오차를 보정한다. 논문은 물리‑가상 입력 불일치가 유계(bound)일 때 동기화 오차도 유계임을 수학적으로 증명한다. 세 번째 기여는 대역폭 적응형 ROS 브리지이다. 각 토픽에 중요도 점수 κ(t)를 부여하고, 메시지 크기·대기 시간·우선순위 점수 P(m)를 계산해 제한된 대역폭 B_avail 안에서 고우선순위·소형 메시지를 먼저 전송한다(알고리즘 3). 이 스케줄러는 η와 ε 파라미터를 통해 대기 시간이 긴 메시지의 우선순위를 점진적으로 상승시켜 스타베이션을 방지한다. 또한, 중요도에 따라 고·중·저 세 단계의 레벨‑오브‑디테일(LoD) 정책을 적용해 원거리 영역의 업데이트 빈도를 낮춤으로써 전체 네트워크 부하를 최소화한다. 실험에서는 표준 ROS 설정 대비 엔드‑투‑엔드 지연을 15‑25 % 줄이고, CPU 사용량을 약 15 % 감소시켰으며, 위치·회전 오차를 각각 5 cm·2° 이하로 유지했다. 내비게이션 태스크에서는 실제 로봇만 사용했을 때 85 %였던 성공률이 SERN을 적용해 95 %로 상승했고, 시뮬레이션 전용 대비 25 %p 이상의 향상을 보였다. 이러한 결과는 제한된 통신 환경에서도 가상 트윈이 실시간 의사결정 지원 역할을 충분히 수행할 수 있음을 입증한다. 논문은 또한 비용 함수가 지연·신뢰도·연산·대역폭을 동시에 고려하도록 설계돼, 운영 중 동적으로 최적의 전송 전략을 선택한다는 점에서 실용성이 높다. 전체적으로 SERN은 디지털 트윈, 혼합 현실, 로봇 협업 분야에서 통신 제약을 실시간 제어와 결합한 새로운 시스템 아키텍처를 제시한다는 점에서 의의가 크다.
댓글 및 학술 토론
Loading comments...
의견 남기기