ADMM 기반 손‑물체 접촉 최적화로 다중 손가락 잡기 품질 향상
초록
본 논문은 Dexonomy의 샘플링 기반 다양성 유지와 물리 시뮬레이션을 활용한 충돌 해결 장점을 살리면서, 접촉점과 손 자세를 ADMM으로 교대로 최적화한다. 이를 통해 동적 안정성 지표를 직접 최대화하고, 정확한 충돌 방지를 보장한다. 실험 결과, 유형 무관 합성에서 성공률이 약 15 %p, 유형 별 합성에서는 100 %에 달하는 상대 향상을 달성하였다.
상세 분석
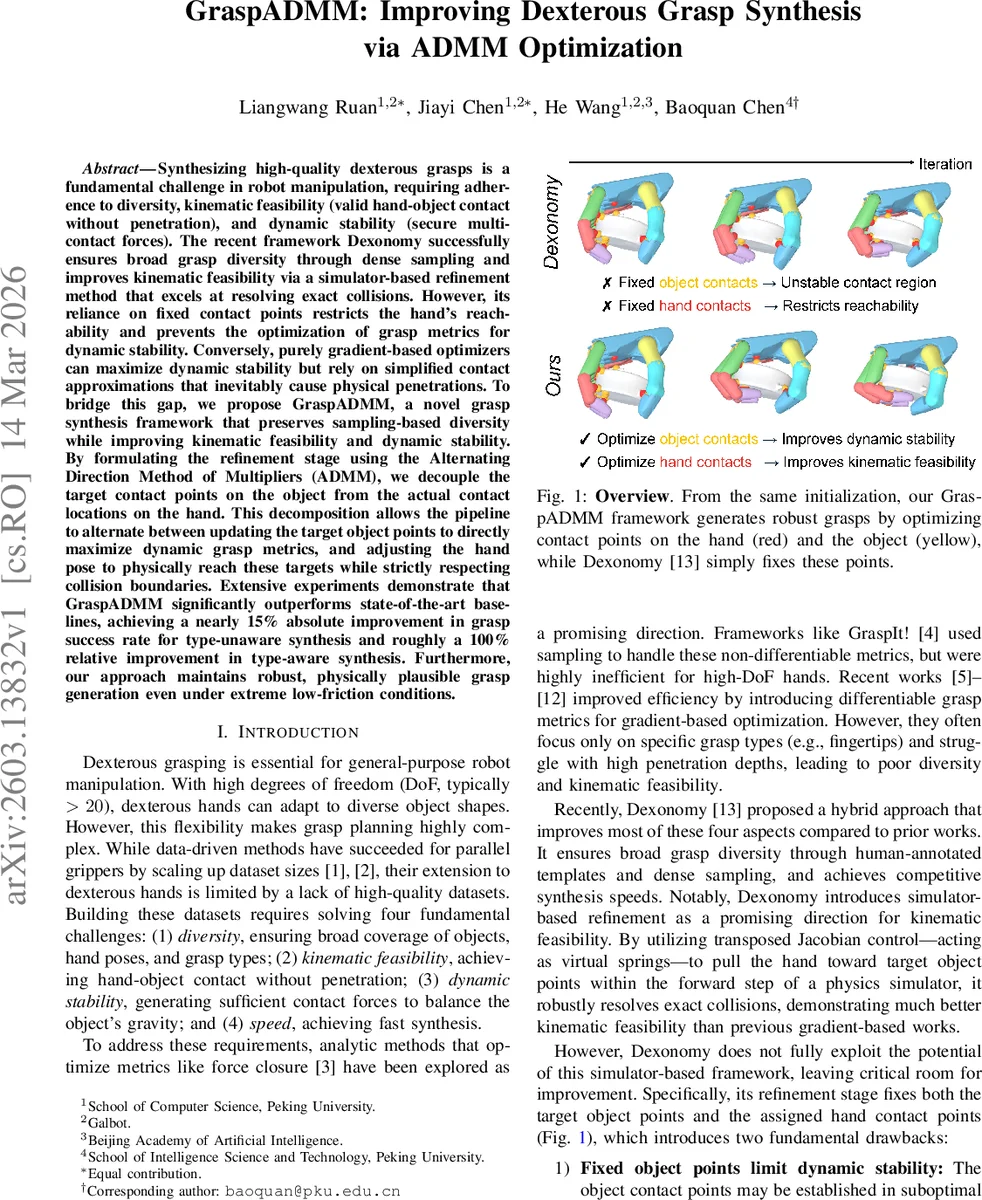
GraspADMM은 기존 Dexonomy이 갖는 두 가지 근본적인 한계를 해결한다. 첫째, Dexonomy은 초기화 단계에서 물체 표면에 고정된 목표 접촉점을 사용하기 때문에, 동적 안정성을 위한 최적의 접촉 배치를 탐색하지 못한다. 둘째, 손의 실제 접촉점도 고정된 채 시뮬레이터 기반 정제만 수행하므로, 손의 관절 가동 범위 내에서 목표점을 동시에 만족시키기 어려워 충돌이나 불가능한 자세가 발생한다. GraspADMM은 이러한 제약을 완화하기 위해 목표 물체 접촉점(p_o)과 손의 실제 접촉점(p_h)을 독립적인 변수로 두고, Alternating Direction Method of Multipliers(ADMM)를 적용한다.
ADMM의 핵심은 augmented Lagrangian을 구성해 hard constraint인 p_h = p_o 를 완화하고, 두 변수에 대해 교대로 최적화를 수행하는 것이다. 구체적으로, (1) 목표 물체 접촉점은 동적 안정성 지표인 force‑closure residual e를 최소화하면서, 현재 손 접촉점과 라그랑주 승수 λ에 의해 정의된 quadratic penalty를 고려해 gradient descent로 업데이트한다. 이때 물체 표면에 투사(projection)하여 표면 제약을 만족한다. (2) 손 자세와 실제 접촉점은 MuJoCo 물리 엔진을 이용해 forward simulation을 수행한다. 가상 스프링 힘 f_i = k_f (p_o – λ – p_h) 를 각 접촉점에 적용하고, 이를 손 관절 토크 τ = Σ J_h,i^T f_i 로 변환해 시뮬레이션을 전진시킨다. MuJoCo는 충돌을 정확히 해결하므로 손은 비침투 상태를 유지하면서 목표점에 가까워진다. (3) 마지막으로 λ ← λ + (p_h – p_o) 로 라그랑주 승수를 갱신한다. 이 세 단계가 한 번씩 순환하면서 수렴하면, 물체 접촉점은 동적 안정성을 극대화하도록 이동하고, 손은 물리적으로 가능한 자세로 그 점들을 정확히 맞춘다.
동적 안정성 평가는 각 접촉점의 마찰 원뿔을 다각형 피라미드로 근사한 뒤, QP(Clarabel)로 최소 잔여 와인치를 구한다. 잔여 와인치가 작을수록 force‑closure가 강하고, 실제 중력(g) 를 0 으로 설정해 단일 QP만 풀어 효율성을 높였다.
실험에서는 5,600개 이상의 물체와 다양한 손가락 유형(전형, 측면, 전후 등)을 대상으로 Dexonomy, MALA, GraspIt! 등 최신 기법과 비교하였다. 유형 무관 합성에서 성공률이 15 %p 상승했으며, 유형 별 합성에서는 20‑30 %p(≈100 % 상대) 향상을 기록했다. 특히 마찰계수 μ=0.1 같은 극저마찰 상황에서도 침투 없이 안정적인 다중 손가락 잡기를 유지했다.
핵심 기여는 (1) 접촉점과 손 자세를 분리해 ADMM으로 교대로 최적화함으로써 동적 안정성 및 충돌 방지를 동시에 달성, (2) 물리 시뮬레이터와 미분 가능한 품질 지표를 자연스럽게 결합한 프레임워크 제시, (3) 기존 Dexonomy 파이프라인에 최소한의 변경만으로 크게 향상된 성능을 입증한 점이다. 한계로는 ADMM 반복 횟수와 ρ, k_f 같은 하이퍼파라미터에 민감할 수 있으며, 실시간 응용을 위해 추가적인 가속 기법이 필요하다는 점을 들 수 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기