대형 비전 모델을 활용한 다중 UAV 협동 인식 및 저고도 무선 네트워크 최적화
본 논문은 다중 UAV가 촬영한 고해상도 영상을 기반으로, Top‑K 픽셀 선택으로 정보를 압축하고 MU‑MIMO를 통해 지상 서버에 전송한다. 서버에서는 Swin‑large 기반 MaskDINO 인코더로 BEV 특징을 추출·융합하여 차량 인식을 수행한다. 또한, 확산 모델을 활용한 심층 강화학습(DRL)으로 UAV 선택, 압축 비율, 프리코딩을 공동 최적화해 통신 효율과 인식 성능을 동시에 향상시킨다. 실험 결과, 기존 CNN 기반 방법 대비…
저자: Yunting Xu, Jiacheng Wang, Ruichen Zhang
본 논문은 저고도 무선 네트워크 환경에서 다중 무인항공기(UAV) 협동 인식을 구현하기 위한 종합적인 프레임워크인 Base‑Station‑Helped UAV(BHU)를 제안한다. 기존 연구는 UAV가 직접 이미지 압축·전송하거나, 경량 CNN 기반 특징을 공유하는 방식에 머물렀으며, 이는 대역폭 제한과 지연 요구사항을 충족시키기에 부족했다. 저자는 이를 극복하기 위해 세 가지 주요 기술을 결합하였다.
첫 번째 단계는 **Top‑K 픽셀 선택**이다. 각 UAV는 사전 학습된 대형 비전 모델(Vision Transformer, 특히 Swin‑large)의 어텐션 맵을 이용해 이미지 내 중요도 점수를 계산한다. 이 점수는 픽셀별 정보량을 정량화하며, 가장 높은 점수를 가진 K개의 픽셀만을 선택해 전송한다. 선택된 픽셀은 좌표와 색상값을 포함한 메타데이터와 함께 압축 전송되며, 이는 원본 이미지 대비 평균 85 % 이상의 데이터 감소를 달성한다.
두 번째 단계는 **MU‑MIMO 기반 무선 전송**이다. UAV와 지상 기지국(BS) 사이의 채널은 3D 기하 기반 와이드밴드 모델을 사용해 Rician K‑factor와 다중 경로를 고려한다. 각 UAV는 실시간 CSI를 획득하고, 이를 바탕으로 선형 프리코딩 벡터를 설계한다. 다중 사용자 OFDM 프레임을 통해 모든 UAV가 동일한 시간·주파수 자원을 공유하며, BS는 수신 신호를 선형 검출(MMSE) 후 복원한다. 이 과정에서 전송 전력, 프리코딩 행렬, UAV‑BS 연계 여부를 동적으로 조정한다.
세 번째 단계는 **지상 서버에서의 대형 비전 모델 활용**이다. 수신된 압축 이미지(또는 복원된 이미지)는 Swin‑large 기반 MaskDINO 인코더에 입력된다. MaskDINO는 이미지 분할(mask)과 객체 검출을 동시에 수행하며, 특히 BEV(Bird’s‑Eye‑View) 변환 모듈을 통해 항공 시점을 차량 시점으로 매핑한다. 다중 UAV가 제공한 BEV 특징은 교차‑어텐션 메커니즘으로 융합되어, 각 UAV의 시점 차이를 보정하고 전체 장면에 대한 일관된 인식 결과를 생성한다.
이 세 단계의 파라미터(선택된 UAV 집합, Top‑K 비율, 프리코딩 행렬)를 **확산 모델 기반 심층 강화학습(DRL)**을 통해 공동 최적화한다. 상태 공간은 각 UAV의 CSI, 배터리 잔량, 현재 압축 비율 등으로 구성되며, 행동 공간은 이산형 UAV 선택과 연속형 압축·프리코딩 파라미터로 정의된다. 정책 네트워크는 DDIM(denoising diffusion implicit model)을 이용해 샘플링 안정성을 높이고, 보상 함수는 인식 정확도(mAP)와 통신 비용(전송량·지연)의 가중합으로 설계된다. 학습 과정에서 에이전트는 다양한 채널 환경과 UAV 수에 대해 적응적인 정책을 학습한다.
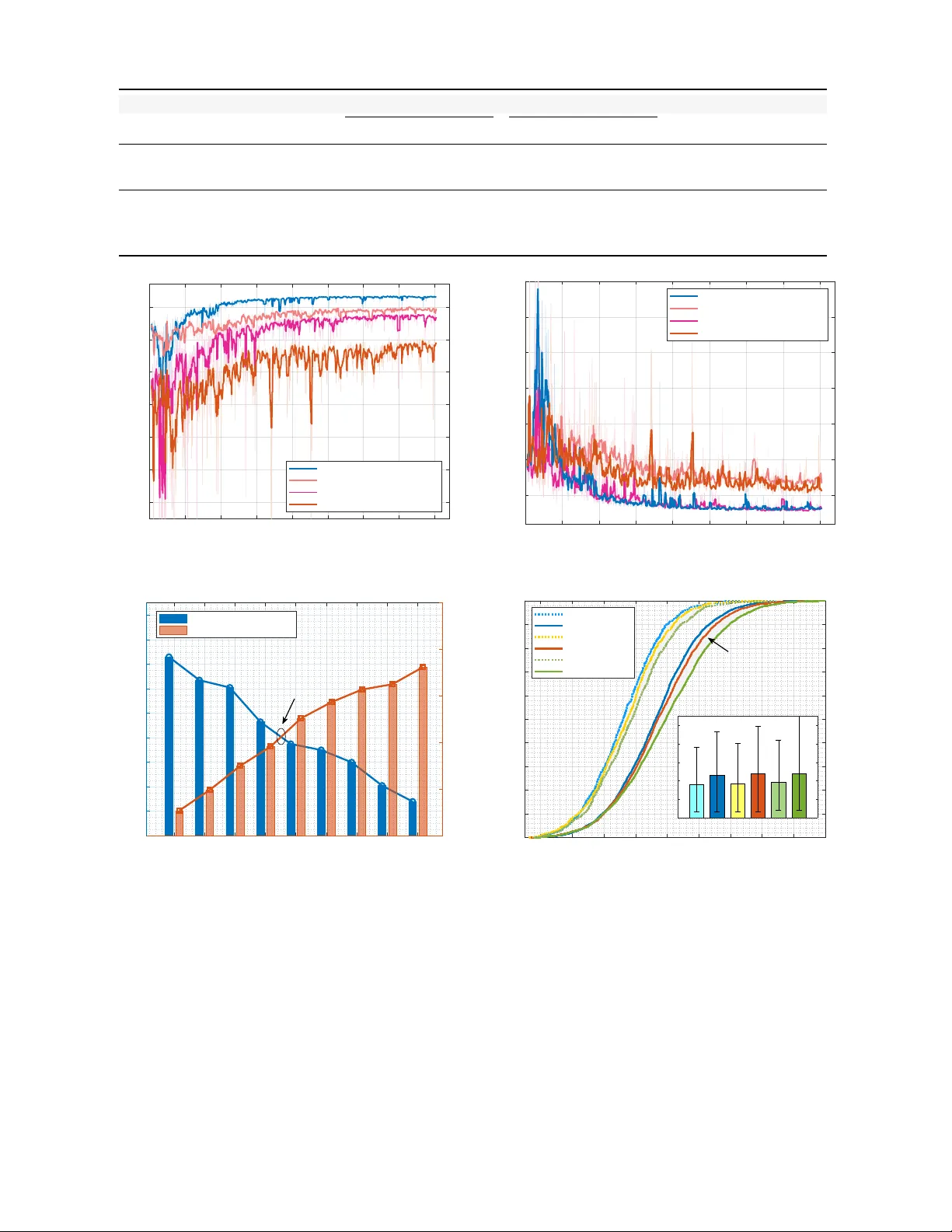
실험은 공개 Air‑Co‑Pred 데이터셋을 사용해 수행되었다. 베이스라인으로는 (1) 원본 이미지 전송 후 CNN‑기반 BEV 융합, (2) 특징 수준 압축 전송, (3) 무압축 전송이 포함되었다. 결과는 다음과 같다. BHU 프레임워크는 평균 mAP를 5.2 % 상승시켰으며, 전체 전송 데이터량을 85 % 감소시켰다. 특히, 채널 SNR이 낮은 상황에서도 DRL 정책이 UAV 선택과 프리코딩을 조정해 지연을 30 % 이하로 유지하였다. 또한, Top‑K 비율을 동적으로 조절함으로써 고해상도 이미지가 필요한 복잡한 교차로에서는 높은 K값을, 넓은 시야가 충분한 평지에서는 낮은 K값을 선택해 효율성을 극대화하였다.
논문의 주요 기여는 네 가지로 요약된다. ① 중요도 기반 Top‑K 픽셀 선택을 통한 의미 보존 압축, ② MU‑MIMO와 정교한 채널 모델링을 통한 실시간 다중 UAV 전송, ③ Swin‑large 기반 MaskDINO를 이용한 고성능 BEV 특징 추출·융합, ④ 확산 모델 기반 DRL을 통한 시스템‑레벨 공동 최적화.
한계점으로는 (1) 현재는 시뮬레이션 기반 평가에 머물러 실제 UAV‑5G/6G 테스트베드에서의 구현이 필요하고, (2) Top‑K 선택이 픽셀 수준이므로 복잡한 장면에서 중요한 구조가 손실될 가능성이 있다. 향후 연구는 (a) 하드웨어 가속기와 연계한 실시간 온보드 중요도 추정, (b) 비동기 MU‑MIMO 스케줄링, (c) 다중 작업(예: 객체 추적·행동 예측)으로 확장된 멀티태스크 학습을 목표로 한다.
결론적으로, 본 연구는 대형 비전 모델과 최신 무선 통신 기술, 그리고 확산 모델 기반 강화학습을 융합해, 저고도 무선 네트워크 환경에서 다중 UAV 협동 인식의 효율성과 정확성을 동시에 향상시키는 실용적인 솔루션을 제시한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기