달궤도 근접작업을 위한 시각 이상 탐지 데이터셋 및 모델 기반 알고리즘
초록
본 논문은 달궤도에 배치될 Lunar Gateway의 외부 로봇인 Canadarm3이 카메라 영상을 통해 위험 물체를 실시간으로 감지하도록 설계된 시각 이상 탐지·위치추정 문제를 정의하고, 이를 위한 대규모 합성 데이터셋 ALLO와 새로운 통계 기반 알고리즘 MRAD를 제안한다. ALLO는 Blender Cycles 엔진으로 실제 조명·배경을 재현한 5만 장 이상의 이미지와 픽셀‑단위 마스크를 제공하며, 기존 산업용 결함 탐지 데이터와 달리 복잡한 우주 조명과 다양한 시점 변화를 포함한다. MRAD는 알려진 카메라 자세와 CAD 모델을 이용해 기대 이미지(레퍼런스)를 생성하고, 확장된 Reed‑Xiaoli 검출기(RXD)와 영역 성장 기법으로 쿼리 이미지와 레퍼런스 이미지 간 차이를 픽셀‑단위 이상 점수로 변환한다. 실험 결과 MRAD는 ALLO 벤치마크에서 픽셀‑AP 62.9 %·이미지‑AUROC 75.0 %를 기록해 최신 딥러닝 기반 이상 탐지 기법들을 크게 앞선다.
상세 분석
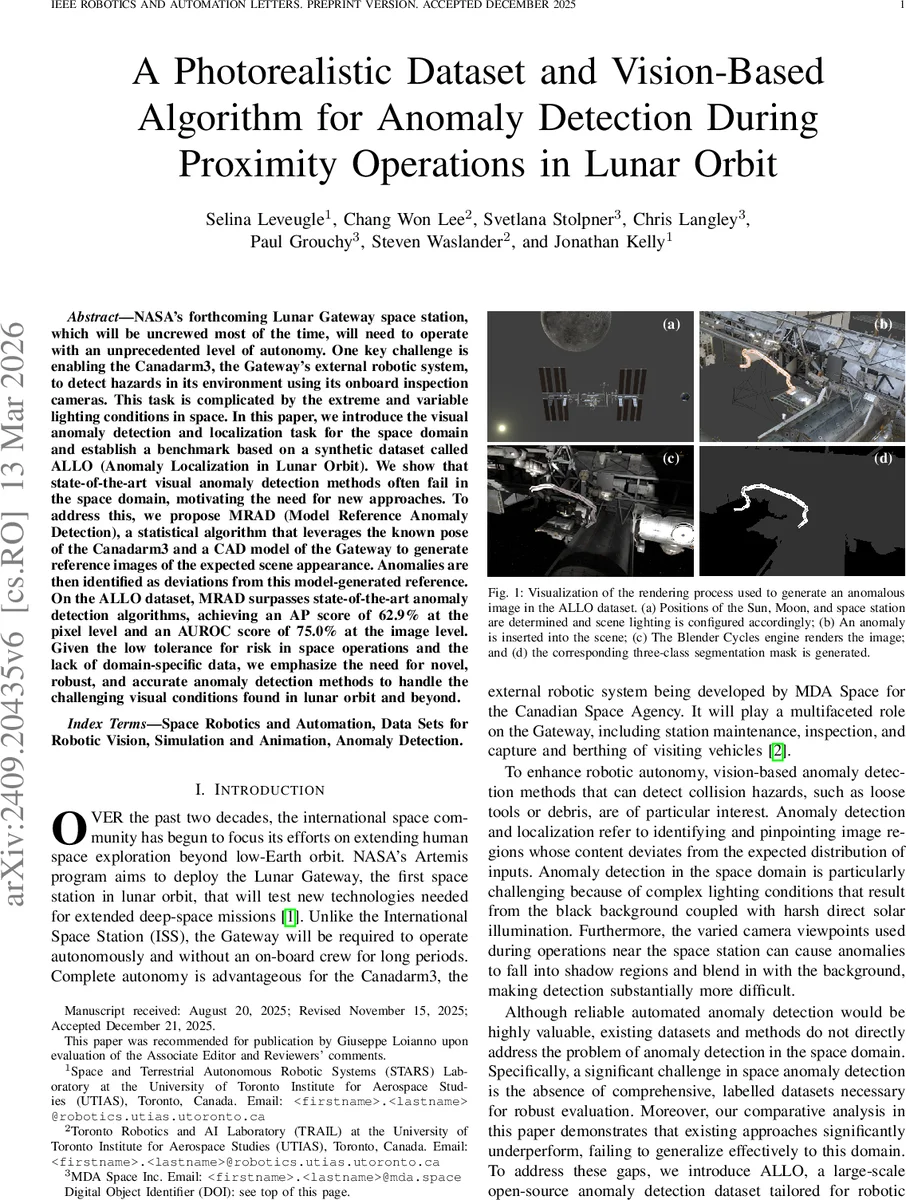
본 연구는 우주 로봇 비전 분야에서 가장 큰 난제 중 하나인 ‘극단적인 조명 변화와 복잡한 배경을 가진 환경에서의 실시간 이상 탐지’를 체계적으로 해결하고자 한다. 먼저 데이터셋 구축 단계에서 저자들은 ISS 모델을 Lunar Gateway의 대체물로 활용하고, 2030년 천문학적 궤도 데이터를 기반으로 지구·달·태양의 상대 위치를 정확히 재현하였다. Blender Cycles의 물리 기반 렌더링을 사용해 ‘검은 우주 배경 + 직접 태양광 + 인공 조명’이라는 삼중 조명 모델을 구현했으며, 카메라 자세는 50개의 기본 포즈에 위치·방향 가우시안 노이즈(1 m, 0.2 rad)를 추가해 실제 로봇 팔의 미세한 자세 오차를 시뮬레이션했다. 이러한 과정은 데이터셋이 실제 운용 상황을 충분히 반영하도록 보장한다.
이상 객체는 열담요, 케이블, 드릴 등 16종을 선정해 5 m 이내의 5가지 깊이(초기 깊이 ±1 m, ±2 m)로 삽입했으며, 객체가 화면에 최소 0.1 % 이상 차지하도록 가시성을 강제한다. 결과적으로 51,409장의 고해상도(1920×1080) 이미지와 배경·정상 전경·이상 객체 3클래스 마스크가 제공된다. 데이터셋 품질 검증을 위해 LPIPS(0.58)와 FID(3.61) 지표를 활용했으며, 이는 최신 이미지 합성 모델과 비교해 동등하거나 우수한 수준임을 보여준다.
알고리즘 MRAD는 세 단계로 구성된다. ① 레퍼런스 이미지와 쿼리 이미지의 픽셀‑레벨 차이를 확장된 RXD(다채널 공분산 추정 및 정규화)로 변환해 이상 점수를 산출한다. 기존 RXD는 배경이 다변량 정규분포라는 가정에 의존했지만, 여기서는 카메라 자세와 CAD 모델을 이용해 정확한 기대 이미지(레퍼런스)를 생성함으로써 배경 모델링 오류를 최소화한다. ② 고점수 픽셀을 영역 성장(region growing) 알고리즘으로 연결해 후보 이상 영역을 형성하고, 최소 면적 임계값을 적용해 잡음 픽셀을 제거한다. ③ 전체 이미지에 대해 검출된 영역 면적이 사전 정의된 비율을 초과하면 이미지‑레벨 이상으로 판정한다.
실험에서는 기존 SOTA 이상 탐지 모델(예: PatchCore, PaDiM, Student‑Teacher)과 전통 통계 방법(OC‑SVM, RXD 변형)을 동일한 훈련·테스트 프로토콜에 적용했다. 픽셀‑AP와 이미지‑AUROC 모두에서 MRAD가 현저히 앞섰으며, 특히 조명 변동이 큰 이미지에서 딥러닝 기반 모델은 과적합 및 일반화 실패를 보였다. 추가적인 Ablation Study에서는 (1) 레퍼런스 이미지에 조명·자세 노이즈를 삽입했을 때 성능 저하가 3 % 미만에 그쳤으며, (2) RXD 대신 단순 L2 차이를 사용했을 때 AP가 12 % 감소함을 확인했다. 이는 MRAD가 레퍼런스 이미지의 정확도에 어느 정도 강인함을 가지면서도, 정교한 통계적 차이 측정이 핵심임을 의미한다.
한계점으로는 현재 레퍼런스 이미지가 완전히 합성된다는 점과, 실제 운용 시 발생할 수 있는 센서 노이즈·압축 아티팩트에 대한 평가가 부족하다는 점을 들 수 있다. 향후 연구에서는 실제 달궤도 촬영 영상과의 도메인 적응, 실시간 GPU 구현, 그리고 다중 카메라·시점 융합을 통한 3D 이상 위치 추정으로 확장할 여지가 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기