경로 일관 캡슐 CBF 안전 필터 기반 확산 플래너
초록
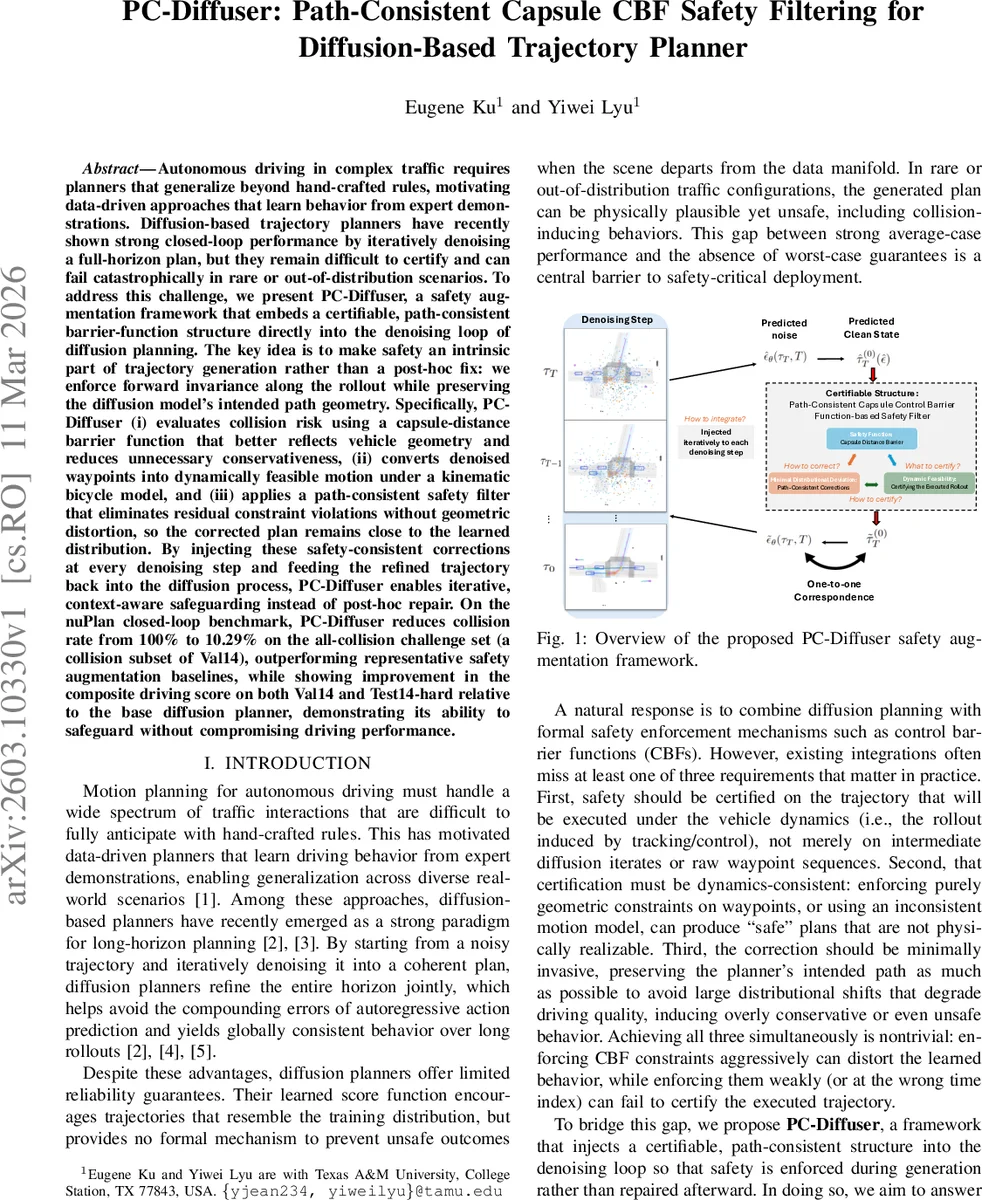
PC‑Diffuser는 확산 기반 장거리 궤적 생성 과정에 캡슐 형태의 제어 장벽 함수(CBF)를 직접 삽입해, 매 denoising 단계마다 차량 동역학을 고려한 안전 검증과 최소한의 경로 변형을 수행한다. 이를 통해 nuPlan 벤치마크에서 충돌률을 100 %에서 10.29 %로 낮추면서도 주행 점수를 유지한다.
상세 분석
본 논문은 데이터‑드리븐 확산 플래너가 제공하는 전역적 궤적 일관성은 유지하되, 안전성을 형식적으로 보증하기 위한 세 가지 핵심 요구사항을 정의한다. 첫째, 인증 대상은 차량이 실제로 실행할 롤아웃(제어 입력에 의해 생성된 동역학적 궤적)이어야 하며, 단순히 중간 waypoint나 diffusion 단계의 샘플이 아니다. 둘째, 안전 제약은 차량의 실제 동역학 모델, 여기서는 kinematic bicycle model에 일관되어야 한다. 이는 CBF 제약을 제어 입력 수준에서 적용함으로써 가능해진다. 셋째, 안전 보정은 원래 학습된 경로를 크게 왜곡하지 않아야 하며, 분포 이동을 최소화해야 한다.
이를 구현하기 위해 저자들은 (i) 차량을 캡슐 형태(앞·뒤 축선에 반경을 더한 형태)로 모델링하고, 두 캡슐 사이의 최소 거리인 capsule‑distance를 기반으로 CBF를 정의한다. 이 방식은 기존 중심점 기반 거리보다 실제 차체 형상을 정확히 반영해 과도한 보수성을 완화한다. 제안된 캡슐 CBF는 최근접점이 유일할 경우 연속적으로 미분 가능함을 증명해, CBF‑QP 최적화에 바로 적용할 수 있다.
(ii) diffusion 단계에서 얻은 waypoint 시퀀스를 바로 제어 입력으로 변환하지 않고, LQR 기반의 경로 추적기를 이용해 명목 제어(u_nom)를 생성한다. 이렇게 얻은 u_nom은 kinematic bicycle dynamics를 만족하므로, CBF‑QP에 필요한 실제 제어 변수(a, δ)를 제공한다.
(iii) 안전 보정은 “경로 일관성(path‑consistency)”을 보장하도록 설계되었다. 구체적으로 스티어링(δ)은 명목값을 그대로 고정하고, 가속도(a)만을 CBF 제약에 따라 최소 수정한다. 이는 차량이 원래 계획된 공간 경로를 벗어나지 않으면서도 속도 조절만으로 충돌을 회피할 수 있게 한다. 보정된 가속도는 등가 속도‑레벨 형태로 변환해 효율적인 1‑D QP로 풀 수 있다.
이러한 세 요소를 매 denoising 단계마다 순환적으로 적용한다. 즉, diffusion 네트워크가 예측한 깨끗한 궤적 ˆτ(t)₀을 받아 CBF‑QP로 안전하게 수정하고, 수정된 궤적을 다시 diffusion 단계에 재투입한다. 이 과정은 “Iterative Context‑Aware Safeguarding”이라 부르며, 기존의 사후 보정(post‑hoc) 방식이 갖는 일회성 한계를 극복한다.
실험에서는 nuPlan의 all‑collision challenge set(V al14)에서 기본 diffusion 플래너가 100 % 충돌을 일으키는 반면, PC‑Diffuser는 10.29 %로 크게 감소시켰다. 또한, Val14와 Test14‑hard 두 데이터셋 모두에서 복합 주행 점수가 향상돼, 안전성을 확보하면서도 주행 품질을 유지하거나 개선할 수 있음을 입증한다.
댓글 및 학술 토론
Loading comments...
의견 남기기