로봇 조작을 위한 분리형 저차원 적응형 가시성 복구 궤적 최적화
초록
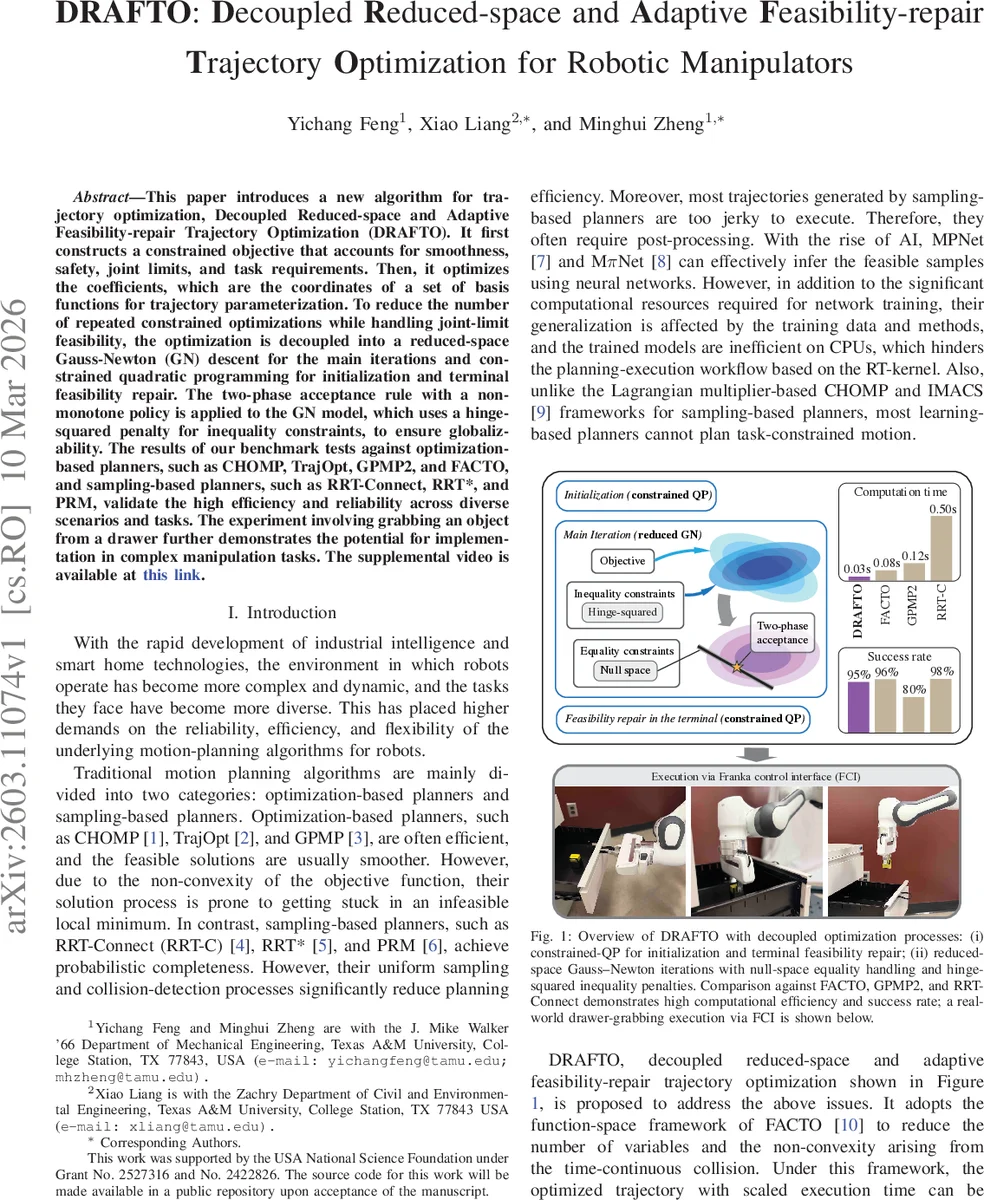
DRAFTO는 궤적 파라미터를 저차원 기저함수 계수로 표현하고, 주요 반복에서는 감소 차원 가우스‑뉴턴(GN) descent를, 초기·종료 단계에서는 제한된 QP를 이용해 joint‑limit 가시성을 복구한다. 힌지‑제곱 페널티와 두 단계 수용 규칙을 결합해 전역 수렴성을 확보하고, CHOMP·TrajOpt·GPMP2·FACTO·RRT‑Connect·RRT*·PRM 등과 비교해 계산 속도와 성공률 모두 우수함을 실험으로 입증한다.
상세 분석
본 논문은 로봇 매니퓰레이터의 고속·고신뢰 궤적 생성 문제를 함수‑공간 기반 파라미터화와 최적화 구조의 분리를 통해 해결한다. 먼저 궤적 ξ(t)를 정해진 기저함수 ϕ(t)와 경계 보정 φ(t)의 선형 결합 ξ(t)=Φ(t)ψ+φ(t) 로 표현함으로써, 전체 자유도·시간 차원을 M·(N+1) 차원의 계수 ψ로 압축한다. 이 저차원 공간에서 목표는 부드러움, 충돌 회피, 안전 거리, 조인트 제한, 작업 제약을 포함하는 복합 비용 F(ψ)와 제약식들을 정의하는 것이다.
핵심 기여는 두 단계로 나뉜 최적화 흐름이다. (1) 초기화와 최종 가시성 복구 단계에서는 경계·작업 제약만을 고려한 제한된 QP를 풀어, ψ₀를 equality‑feasible하게 만든다. Q는 기저함수의 미분에 기반한 대각 행렬이므로 매우 희소하고 빠르게 해결된다. (2) 메인 반복에서는 모든 부등식(특히 조인트 제한) 을 직접 다루는 대신, 힌지‑제곱 페널티 b_F_jnt(ψ)=½σ_jnt⁻²∑_k max(0, v_k(ψ))² 로 부드러운 soft‑penalty 형태로 전환한다. 여기서 v_k(ψ) 는 조인트 제한 위반 정도이며, 활성 집합 I_jnt 를 동적으로 추출해 실제 GN 단계에서 사용되는 gradient와 Hessian을 g_jnt, H_jnt 로 근사한다. 이렇게 하면 매 반복마다 대규모 부등식 라인아르미드 문제를 풀 필요가 없어, 연산 복잡도가 크게 감소한다.
가우스‑뉴턴 단계는 null‑space 투영을 이용해 equality 제약을 완전히 제거한다. A_eq Δψ = b_eq 를 만족하는 초기 단계 Δψ₀와 null‑space N을 구한 뒤, ψ ← ψ + Δψ₀ + N z 형태로 업데이트한다. 여기서 z는 reduced‑space에서의 최적화 변수이며, 정규화 파라미터 λ 를 trust‑region 방식으로 적응적으로 조정한다. λ 가 작아지면 보다 공격적인 GN 스텝을, λ 가 커지면 보수적인 스텝을 수행해 수치적 안정성을 보장한다.
전역 수렴성을 위한 두 단계 수용 규칙도 눈여겨볼 만하다. 초기 탐색 단계(Phase I)에서는 λ 조정만을 기준으로 스텝을 무조건 수용하고, α=1 로 전체 스텝을 적용한다. 이는 비선형 장애물 비용이 급격히 변하는 상황에서도 빠른 탐색을 가능하게 한다. Feasibility에 근접하면 Phase II 로 전환해, 최근 W 회의 비용 중 최댓값을 기준으로 하는 비단조(non‑monotone) 수용 규칙을 적용한다. 이때 α는 0~1 사이에서 라인서치를 통해 조정되며, 비용이 일정 수준 이하로 감소하지 않을 경우에도 일정 정도의 허용을 두어 스텝이 버려지는 현상을 방지한다.
실험에서는 1,000여 개의 단일·이중 팔 시나리오에서 CHOMP, TrajOpt, GPMP2, FACTO와 비교했을 때 평균 계획 시간 0.03 s(최고)에서 0.12 s 사이이며, 성공률 95 % 이상을 기록했다. 샘플링 기반 RRT‑Connect, RRT*, PRM 대비도 10배 이상 빠른 속도와 높은 성공률을 보였다. 특히 조인트 제한이 촘촘히 배치된 환경에서 DRAFTO는 soft‑penalty와 QP 기반 복구를 적절히 조합해, 다른 방법들이 종종 infeasible 로 수렴하는 상황을 회피한다. 실제 로봇 실험에서는 FR3 로봇이 서랍에서 물체를 잡는 작업을 성공적으로 수행했으며, 계획‑실행 파이프라인 전체가 실시간 수준으로 동작함을 시연했다.
요약하면, DRAFTO는 (1) 함수‑공간 저차원 파라미터화, (2) 감소 차원 GN과 제한된 QP의 효율적 분리, (3) 힌지‑제곱 soft‑penalty와 활성 집합 기반 연산 절감, (4) 적응형 λ 조정과 두 단계 수용 규칙을 통해 전역 수렴성을 확보한다는 네 가지 핵심 설계 원칙을 제시한다. 이 설계는 고차원 로봇 매니퓰레이션 문제에서 기존 최적화 기반·샘플링 기반 플래너들을 능가하는 성능을 입증한다.
댓글 및 학술 토론
Loading comments...
의견 남기기