6자유도 등척성 게임에서 건강·뇌졸중 상지 운동 행동 분석: 로봇 인터페이스 설계 시사점
초록
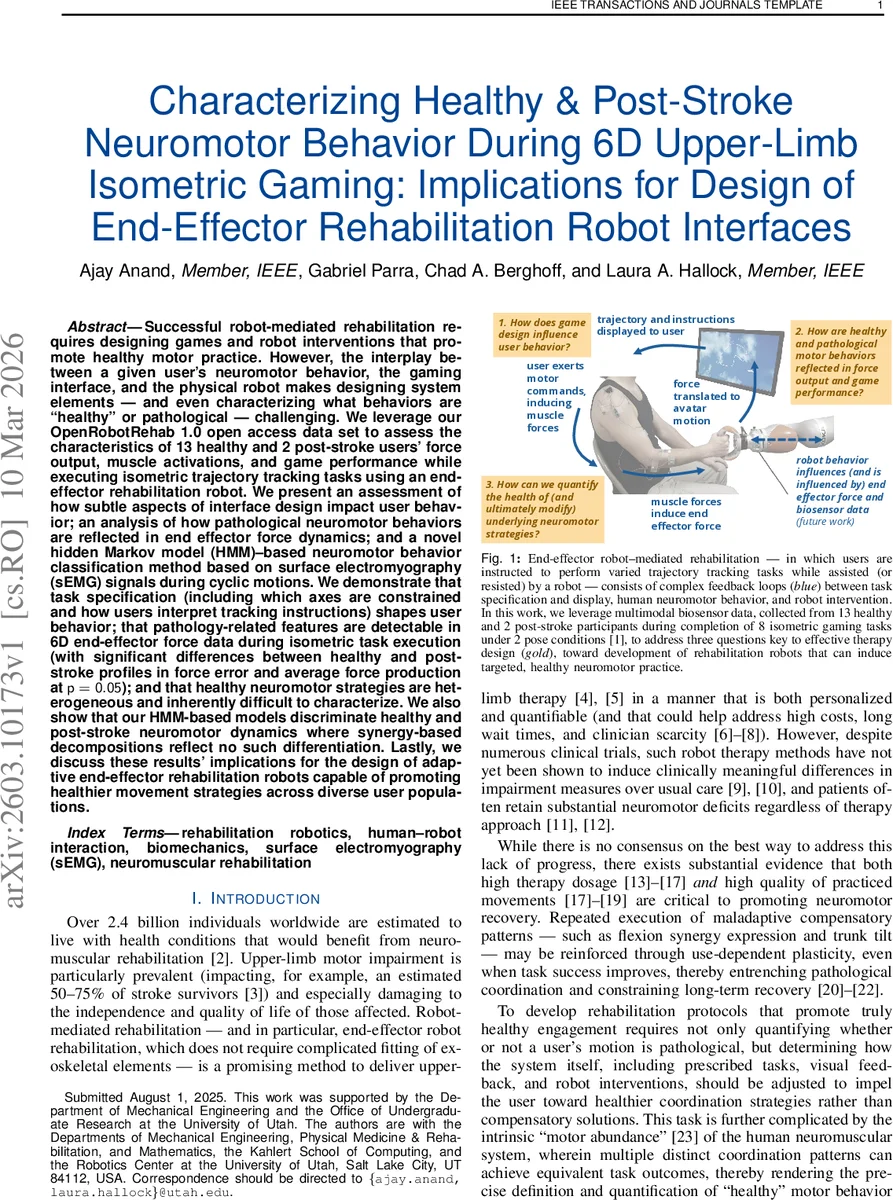
본 연구는 OpenRobotRehab 1.0 데이터셋을 활용해 13명의 건강인과 2명의 뇌졸중 환자가 6 DOF 등척성 궤적 추적 게임을 수행할 때의 힘 출력, 근전도(sEMG) 및 게임 성과를 분석한다. 인터페이스 설계(축 제약 및 목표 해석)의 미세 차이가 사용자의 행동에 큰 영향을 미치며, 병리적 특징이 6 D 힘 데이터에서 통계적으로 구분된다. 또한, 표준 근육 시너지 분석보다 은닉 마르코프 모델(HMM)이 sEMG 기반으로 건강·병리 구분에 더 우수함을 보여준다. 이러한 결과는 적응형 엔드‑이펙터 로봇이 사용자의 건강한 운동 전략을 유도하도록 설계되는 데 중요한 근거를 제공한다.
상세 분석
본 논문은 로봇 기반 재활 치료에서 “건강한” 운동 패턴을 정의하고 이를 촉진하기 위한 인터페이스 설계 원칙을 탐구한다. 데이터는 13명의 정상 피험자와 2명의 만성기 소아 뇌졸중 환자로부터 8가지 등척성 궤적 추적 과제(2가지 자세 조건) 동안 6 DOF 힘 토크, 8채널 sEMG, 게임 성공률을 동시 수집한 OpenRobotRehab 1.0 공개 데이터셋을 이용하였다.
첫 번째 분석에서는 축 제약(예: 특정 축은 자유롭게 움직이게 하거나 고정)과 목표 지시(“경로를 따라가라” vs “목표점에 도달하라”)가 사용자의 힘 출력 및 근전도 패턴에 미치는 영향을 정량화했다. 결과는 사용자가 자유 축에 과도한 힘을 가하거나, 목표 해석이 모호할 경우 비정상적인 협동 수축(co‑contraction)과 힘 변동성이 증가함을 보여준다. 특히, 뇌졸중 환자는 제한된 축에서 더 큰 평균 힘 오류와 높은 힘 변동성을 보였으며, 이는 정상군보다 목표 해석에 대한 의존도가 높아짐을 시사한다.
두 번째로, 6 D 힘 데이터만으로도 병리적 특성을 감지할 수 있음을 입증했다. 힘 오류(mean absolute error)와 평균 힘 생산량(mean force)에서 p = 0.05 수준의 유의미한 차이가 관찰되었으며, 특히 회전 축에서 뇌졸중 환자의 힘 진폭이 현저히 감소하고 변동성이 증가했다. 이러한 힘 기반 지표는 기존에 주로 사용되던 운동 범위나 속도와 달리, 사용자가 실제로 로봇과 상호작용하는 물리적 부하를 직접 반영한다.
세 번째 핵심 기여는 sEMG 시계열을 이용한 은닉 마르코프 모델(HMM) 기반 분류이다. 기존 근육 시너지 분석은 차원 축소와 평균적인 협동 패턴을 추출하지만, 병리와 정상 사이의 미세한 시간적 변화를 포착하기 어렵다. 저자들은 각 과제별로 3~5개의 숨은 상태를 갖는 HMM을 학습시켰으며, Viterbi 알고리즘을 통해 상태 전이 확률과 방출 확률을 추정했다. 교차 검증 결과, HMM은 정상·뇌졸중 구분 정확도가 92 %에 달했으며, 시너지 기반 선형 판별(LDA)은 68 %에 머물렀다. 특히, HMM이 포착한 특정 상태는 과도한 어깨 굴곡·전방 경사와 같은 보상 움직임과 연관되어, 임상적으로 의미 있는 보상 패턴을 자동으로 식별할 수 있음을 보여준다.
마지막으로, 논문은 이러한 분석 결과를 바탕으로 적응형 로봇 제어 전략을 제안한다. 예를 들어, 사용자가 특정 축에서 과도한 힘을 가하면 로봇이 해당 축을 부분적으로 저항하거나 보조함으로써 협동 수축을 억제하고, HMM이 감지한 비정상 상태 전이가 발생하면 실시간 시각 피드백을 제공해 올바른 근육 활성화를 유도한다. 이는 “양질의 반복 연습”이라는 재활 핵심 원칙을 기술적으로 구현하는 방법론으로 해석될 수 있다.
전반적으로, 이 연구는 (1) 인터페이스 설계가 사용자의 신경근육 행동에 미치는 미세 효과, (2) 6 D 힘 데이터가 병리적 특성을 드러내는 유효한 바이오마커, (3) HMM이 sEMG 기반 병리 구분에서 시너지 분석을 능가한다는 세 가지 주요 인사이트를 제공한다. 이러한 결과는 차세대 엔드‑이펙터 로봇이 사용자 맞춤형, 실시간 적응형 피드백을 제공함으로써 건강한 운동 전략을 강화하고, 재활 효율성을 높이는 설계 지침을 제시한다.
댓글 및 학술 토론
Loading comments...
의견 남기기