비볼록 환경을 위한 일반화 보로노이 그래프 기반 다중 로봇 커버리지 제어
초록
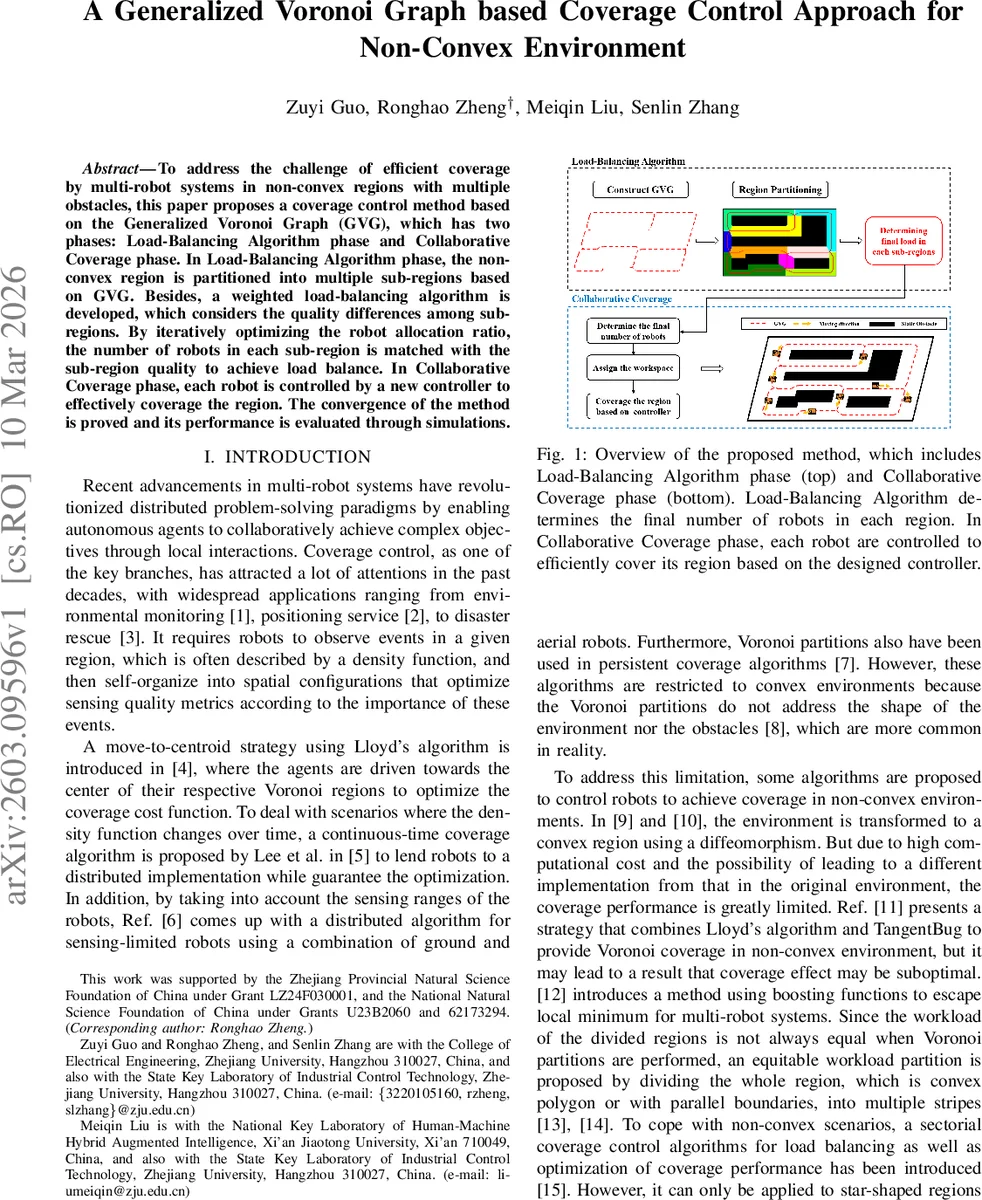
본 논문은 다중 로봇이 장애물이 다수 존재하는 비볼록 영역을 효율적으로 커버하도록, 일반화 보로노이 그래프(GVG)를 이용해 영역을 서브 영역으로 분할하고, 가중치를 고려한 로드밸런싱 알고리즘으로 로봇 수를 최적 배분한 뒤, 각 서브 영역 내에서 새로운 협업 커버리지 제어기를 적용한다. 알고리즘의 수렴성을 이론적으로 증명하고 시뮬레이션을 통해 성능을 검증한다.
상세 분석
이 논문은 비볼록 환경에서 다중 로봇 커버리지를 수행하기 위한 두 단계 접근법을 제시한다. 첫 번째 단계인 Load‑Balancing Algorithm 단계에서는 일반화 보로노이 그래프(GVG)를 이용해 복잡한 환경을 일련의 GVG 셀(또는 서브 영역)로 분할한다. GVG는 장애물과 외부 경계 사이의 등거리 곡선을 연결해 토폴로지를 파악하므로, 기존 보로노이 분할이 직면하는 “경계와 장애물 무시” 문제를 자연스럽게 해결한다. 각 셀에 대해 질량 e_i (밀도 함수 ϕ를 적분한 값)를 정의하고, 전체 질량 e 와 로봇 수 K를 고려해 셀당 이상적인 로봇 비율을 계산한다. 여기서 핵심은 셀 간 가중치를 반영한 “가중량화 합의(weighted quantization consensus)” 문제를 설정하고, Algorithm 1을 통해 연속적인 부하 평균화를 수행한다. 이 과정에서 로봇 수는 실수값 x_i 로 표현되며, 충분히 큰 시간 t₁ 후의 값이 각 셀의 목표 로봇 수 K_i* 의 근사치가 된다.
두 번째 단계는 정수 제약을 만족시키기 위한 Algorithm 2이다. 각 셀은 자신의 부하 c_i = K_i − ⌊K_i*⌋ 를 이웃 셀에 전달하고, “제안(Offering) → 수락(Accepting) → 전달(Passing)” 과정을 통해 과잉 로봇을 부족한 셀로 이동시킨다. 이때 셀 간 부하 차이가 최소가 되도록 최소 부하 이웃을 선택하고, 최대 부하 이웃에게 수락을 요청한다는 규칙이 로드밸런싱을 효율적으로 만든다. 저자는 Theorem 1을 통해 두 알고리즘이 t→∞일 때 모든 셀의 부하 x_i 가 동일한 값으로 수렴함을 증명하고, Theorem 2에서는 실제 정수 배분이 이론적 최적 배분과의 차이가 S₂ = min(|E|−S₁, S₁) 보다 크지 않음을 보인다. 이는 로드밸런싱 결과가 최적에 근접함을 정량적으로 보장한다.
커버리지 제어 단계에서는 각 셀 내부에서 로봇이 GVG 엣지 E_i 를 따라 이동하도록 설계된 새로운 제어법을 제시한다. Lemma 1에 따르면, 엣지 위의 임의 점 p 에 대해 해당 점이 가장 가까운 셀 내부 점들의 집합 Q_i(p) 는 연속적인 1‑차원 경로를 형성한다. 이를 이용해 로봇은 엣지 위에서 “가장 가까운 점”을 기준으로 영역을 스캔하면서 센서 범위 내의 밀도 ϕ(q) 를 최소화하도록 움직인다. 제어식은 \dot p_j = u_j 형식이며, u_j는 현재 위치와 현재 셀의 질량 중심(또는 가중 평균) 사이의 차이를 이용해 설계된다. 수렴 증명은 기존 Lloyd‑type 알고리즘과 유사하게 Lyapunov 함수 H (전체 커버리지 비용)를 정의하고, 제어기가 H 의 감소를 보장함을 보인다.
시뮬레이션 결과는 (1) GVG 기반 분할이 복잡한 다중 구멍 환경에서도 균일한 셀 크기와 질량을 제공함, (2) 가중 로드밸런싱이 로봇 수를 질량에 비례하게 배분해 커버리지 비용을 크게 감소시킴, (3) 기존 Lloyd‑기반 비볼록 커버리지 방법에 비해 수렴 속도가 빠르고 최종 비용이 낮음을 보여준다. 특히, 로봇 수가 충분히 많을 때는 각 셀에 최소 하나의 로봇이 배치되어, 셀 내부에서의 협업 커버리지가 거의 최적에 근접한다는 점이 강조된다.
한계점으로는 (i) 정적 장애물만 고려했으며, 동적 장애물이나 환경 변화에 대한 적응 메커니즘이 부재함, (ii) GVG 계산이 사전 전처리 단계에서 수행되므로 매우 큰 규모의 환경에서는 계산 비용이 증가할 수 있음, (iii) 로봇 간 통신이 이웃 셀 간에만 제한적으로 가정되어, 통신 지연이나 패킷 손실에 대한 견고성 분석이 부족하다. 향후 연구에서는 동적 장애물 대응, 실시간 GVG 업데이트, 그리고 비동기식 통신 환경에서의 수렴 보장을 위한 확장된 알고리즘을 제안할 수 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기