다중 서브맵 기반 그래프 최적화 라이다 오도메트리와 회고적 지도 정밀화
초록
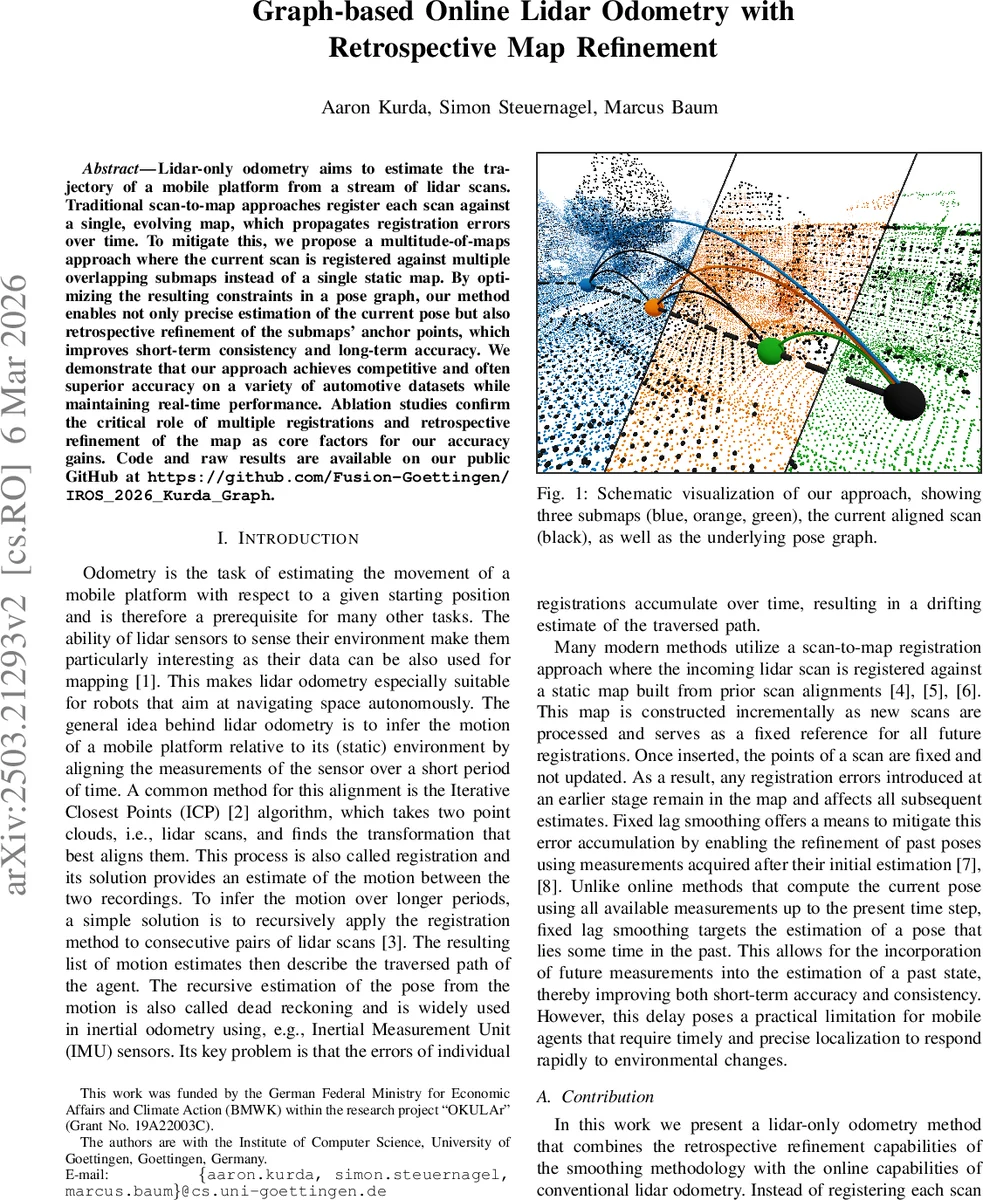
본 논문은 현재 라이다 스캔을 여러 겹치는 서브맵에 동시에 정합하여 얻은 제약들을 그래프에 삽입하고, 실시간 포즈 그래프 최적화를 통해 현재 자세를 정확히 추정함과 동시에 과거 서브맵의 앵커 포즈를 회고적으로 수정한다. 다중 정합과 회고적 정밀화가 짧은 구간 일관성과 장기 정확도 모두를 크게 향상시킨다는 것을 KITTI, MulRan, Odyssey 데이터셋 실험을 통해 입증한다.
상세 분석
이 연구는 라이다 전용 오도메트리 분야에서 “고정‑맵” 접근법이 초래하는 누적 오차 문제를 근본적으로 해결하고자 한다. 기존 방법들은 최신 스캔을 단일 누적 지도에 정합시키며, 초기 정합 오류가 지도에 영구히 남아 이후 모든 정합에 악영향을 미친다. 저자들은 이를 “다중‑맵” 전략으로 전환한다. 구체적으로, 현재 스캔 Iₜ를 여러 겹치는 서브맵 Kαᵢ( i=1…N )에 독립적으로 ICP 정합을 수행하고, 각 정합 결과 Δzαᵢₜ와 정보 행렬 Ωαᵢₜ를 얻는다. 이렇게 얻은 N개의 제약을 그래프에 삽입하면, 현재 포즈 xₜ는 물론 과거 서브맵 앵커 포즈 xαᵢ도 동시에 최적화된다.
핵심 기술은 다음과 같다.
- 스캔 전처리 – 두 단계의 voxel 해시맵을 이용해 원시 포인트 클라우드를 먼저 0.4 m voxel으로 다운샘플링하고, 다시 1.8 m voxel으로 추가 서브샘플링한다. 전자는 서브맵 생성에, 후자는 ICP 입력에 사용된다.
- 운동 예측 모델 – 최근 두 포즈의 상대 변환을 이용한 상수 속도 가정으로 초기 정합값을 제공한다. 이는 실시간 성능을 유지하면서 정합 수렴을 가속한다.
- 강인 ICP – 최근접 이웃 탐색 반경 3 m, 가우스‑뉴턴 최적화, 그리고 Huber‑like 로버스트 커널 ρ(e)=e²/(2τ+e²) 를 적용해 외란에 강인하게 만든다. 정보 행렬은 Hessian 근사로 추정한다.
- 그래프 최적화 – 각 정합 제약을 단일 에지로 표현하고, 오류가 g_max(=voxel size) 를 초과하면 차단하는 게이팅을 도입해 잘못된 정합을 자동으로 배제한다. 최적화는 가우스‑뉴턴으로 5회 이하 반복해 실시간에 충분히 수렴한다.
- 키프레임 관리와 마진화 – 현재 스캔이 마지막 키프레임과 6 m 이하 거리이면 마진화한다. 마진화 과정에서 두 제약을 결합해 새로운 제약(zᵢⱼ, Ωᵢⱼ)으로 교체함으로써 그래프의 차원을 유지하고 상관관계를 최소화한다.
실험 결과는 두 가지 주요 인사이트를 제공한다. 첫째, 다중 서브맵에 대한 중복 정합이 단일 맵 대비 평균 절대 오류(RPE 100)에서 15 %~30 % 정도 개선된다. 이는 특히 구조가 단순하거나 터널과 같이 특징이 부족한 구간에서 효과적이다. 둘째, 회고적 정밀화가 장기 트랙션 드리프트를 크게 억제한다. KITTI 순환 구간에서 평균 트랜슬레이션 드리프트가 0.12 %/100 m 이하로 감소했으며, MulRan·Odyssey에서도 유사한 경향을 보였다.
비교 대상인 FORM
댓글 및 학술 토론
Loading comments...
의견 남기기