계층적 의사결정을 통합한 비선형 역기구학 계획 및 제어
초록
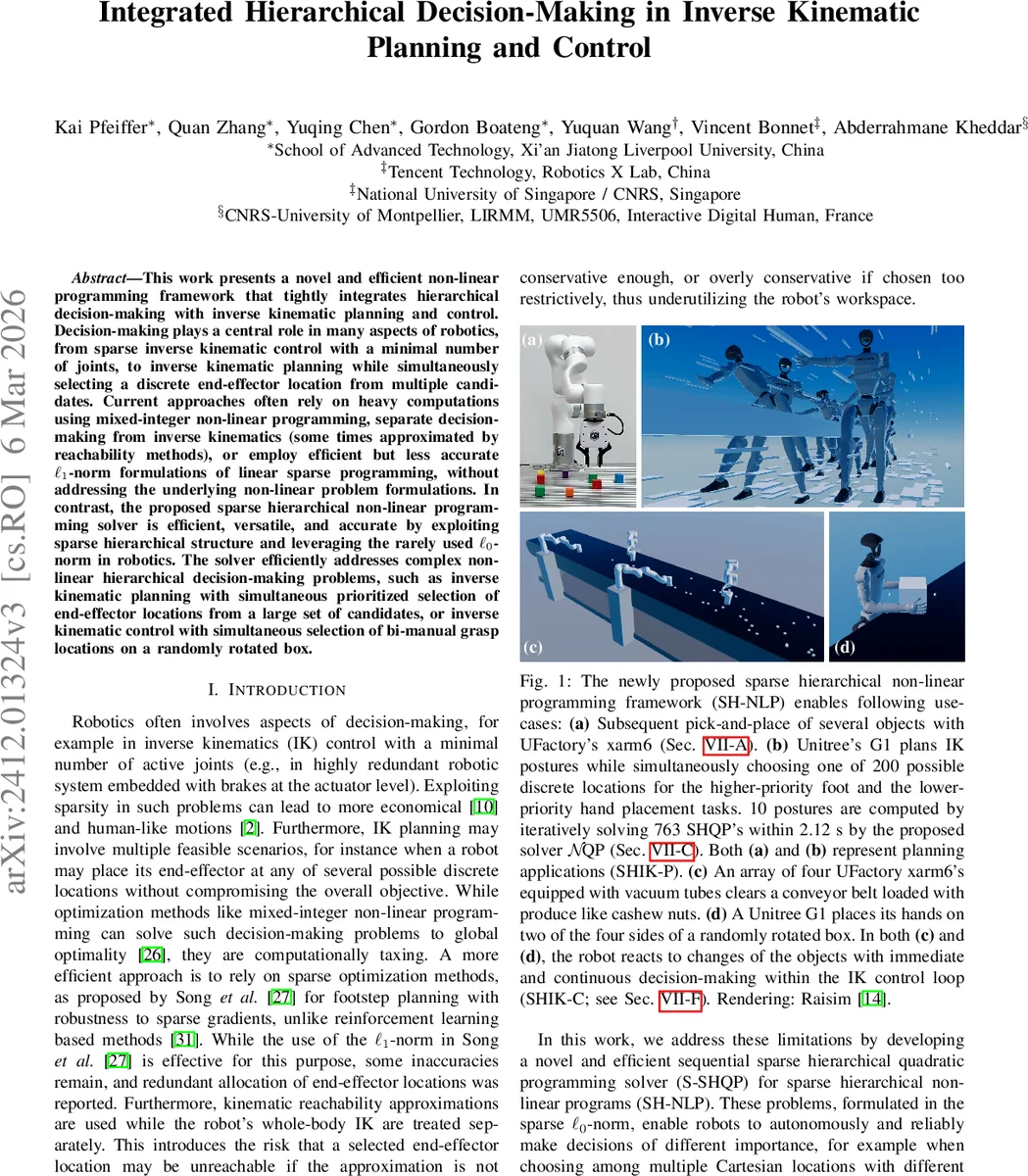
본 논문은 ℓ₀‑노름 기반의 희소 계층적 비선형 프로그래밍(SH‑NLP) 프레임워크와 이를 해결하기 위한 순차적 희소 계층적 이차계획(S‑SHQP) 솔버를 제안한다. 로봇의 전신역기구학(IK) 계획·제어와 동시에 다수의 후보 목표 위치 중 우선순위에 따라 자동 선택하도록 설계되었으며, 기존의 혼합정수 비선형 프로그래밍(MINLP)이나 ℓ₁‑완화 방식보다 계산 효율과 정확성을 동시에 달성한다. 실험에서는 다중 목표 선택, 양손 잡기, 실시간 제어 등 다양한 시나리오에서 1‑2 ms 수준의 제어 주기를 보이며, 기존 QP 솔버 대비 30 % 이상 빠른 성능을 입증한다.
상세 분석
본 연구는 로봇 시스템에서 “몇 개의 관절만 활성화한다”는 스파스 제어와 “여러 후보 위치 중 하나를 선택한다”는 이산 의사결정을 동시에 다루는 문제를 하나의 최적화 모델로 통합하려는 시도이다. 기존에는 혼합정수 비선형 프로그래밍(MINLP)이나 ℓ₁‑노름 기반의 완화 기법을 사용했지만, 전자는 계산량이 기하급수적으로 증가하고, 후자는 희소성을 완벽히 보장하지 못한다. 저자들은 ℓ₀‑노름을 직접 활용함으로써 진정한 희소성을 달성하고, 이를 로그 서러게이트(logarithmic surrogate)로 부드럽게 근사해 연속적인 비선형 프로그램(SH‑NLP)으로 변환한다.
핵심 알고리즘은 순차적 희소 계층적 이차계획(S‑SHQP)이다. 현재 상태 xₖ에서 비선형 제약 f(x)와 목표 슬랙 v를 1차·2차 테일러 전개하여 이차형 서브문제(SH‑QP)를 만든 뒤, 특수 구조를 이용한 전용 interior‑point 솔버(N‑QP)를 적용한다. 여기서 중요한 점은 각 우선순위 레벨 l마다 활성 제약의 널스페이스 N_{l‑1}에 투영하여 변수 차원을 감소시키고, 계층적 라그랑지안 해시안 H_l을 통해 뉴턴 스텝을 보강한다는 것이다. 이 과정은 신뢰구역(trust‑region)과 계층적 스텝‑필터(HSF)를 결합해 전역 수렴성을 확보한다.
알고리즘은 두 가지 운영 모드에 맞게 동작한다. 계획 모드(SHIK‑P)에서는 HSF가 제안된 스텝의 타당성을 검증하고, 필요 시 신뢰구역을 조정해 반복한다. 제어 모드(SHIK‑C)에서는 매 제어 주기마다 스텝을 바로 적용해 실시간성을 확보한다. 실험에서는 800개 이상의 후보 위치를 포함한 복잡한 시나리오에서도 선형 시간 복잡도로 제약을 처리했으며, 기존 상용 QP 솔버인 PIQP·MOSEK 대비 30~70 % 빠른 실행 시간을 기록했다. 또한, 양손으로 회전된 박스를 잡는 작업에서 ℓ₀‑노름 기반 선택이 ℓ₁‑완화 대비 불필요한 중복 선택을 현저히 줄이고, 실제 로봇의 작업 성공률을 높였다.
이 논문은 ℓ₀‑노름을 로봇 제어에 적용하는 데 필요한 수학적 근사와 효율적인 구현을 동시에 제공함으로써, 고차원·고차층 구조를 갖는 로봇 시스템에서 실시간 의사결정이 가능한 새로운 패러다임을 제시한다. 다만, 로그 서러게이트 근사의 파라미터 ξ와 가중치 ω의 튜닝이 문제마다 민감하게 작용할 수 있으며, 매우 큰 규모(수만 개 이상의 후보)에서는 여전히 메모리·시간 부담이 존재한다는 점이 향후 연구 과제로 남는다.
댓글 및 학술 토론
Loading comments...
의견 남기기