무한 차원 폐쇄형 역기구학을 통한 연성 로봇 제어
연성 로봇의 무한 차원 형태를 고려한 폐쇄형 역기구학(CLIK) 프레임워크를 제안한다. 액추에이터‑형태 매핑을 신경 연산자(Neural Operator)로 학습하고, 형태‑작업 매핑과의 무한 차원 체인룰을 이용해 Jacobian을 도출한다. 이를 통해 전체 몸체 형태 정보를 활용한 실시간 제어가 가능하며, 상수 곡률 세그먼트와 3‑섬유 연성 팔 실험을 통해 유효성을 검증한다.
저자: Carina Veil, Moritz Flaschel, Ellen Kuhl
본 논문은 연성 로봇의 무한 차원 형태를 고려한 폐쇄형 역기구학(CLIK) 제어 프레임워크를 제시한다. 전통적인 CLIK은 완전 구동 로봇에서 관절 각도와 작업 공간 사이의 Jacobian을 이용해 실시간으로 목표 위치에 수렴하도록 설계된다. 그러나 연성 로봇은 연속적인 변형을 가지며, 액추에이터 수가 자유도보다 적어(under‑actuated) 전통적인 방법을 직접 적용하기 어렵다. 기존 연구는 형태를 유한 차원 기저(예: 다항식, 모드)로 근사해 가상 관절 공간을 정의하고, 그 위에서 CLIK을 수행했다. 이 접근은 형태의 고차 변형을 놓치고, 근사 오차가 제어 성능에 직접 영향을 미친다.
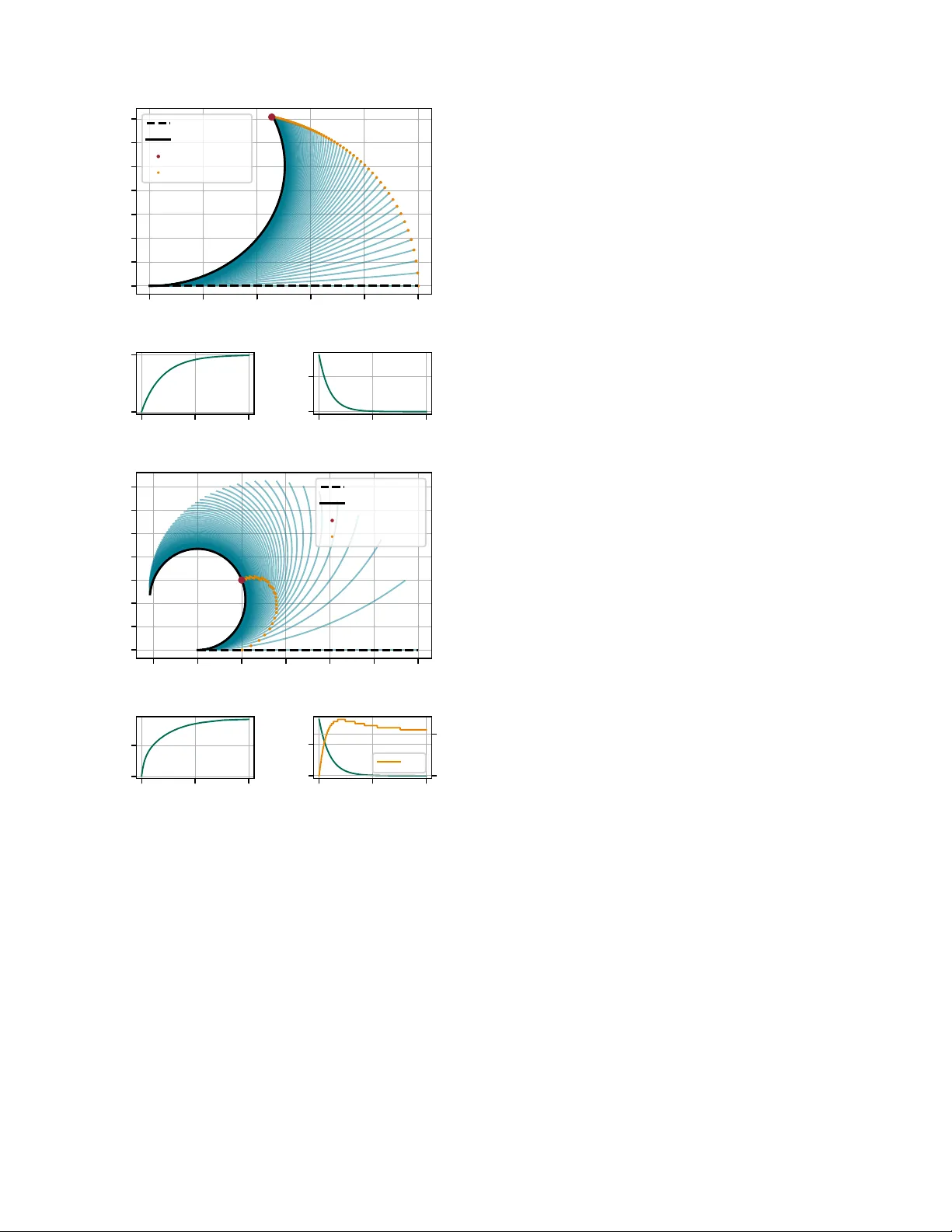
저자는 이러한 한계를 극복하기 위해 두 단계 매핑을 도입한다. 첫 번째 매핑 \(\Lambda:\mathbb{R}^{m}\rightarrow X\) 는 액추에이터 입력 \(\mathbf{q}_{a}\) 을 무한 차원 함수 공간 \(X=L^{2}(
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기