고차원 위치 인코딩과 비국소 MLP를 활용한 효율적인 포인트 클라우드 처리
초록
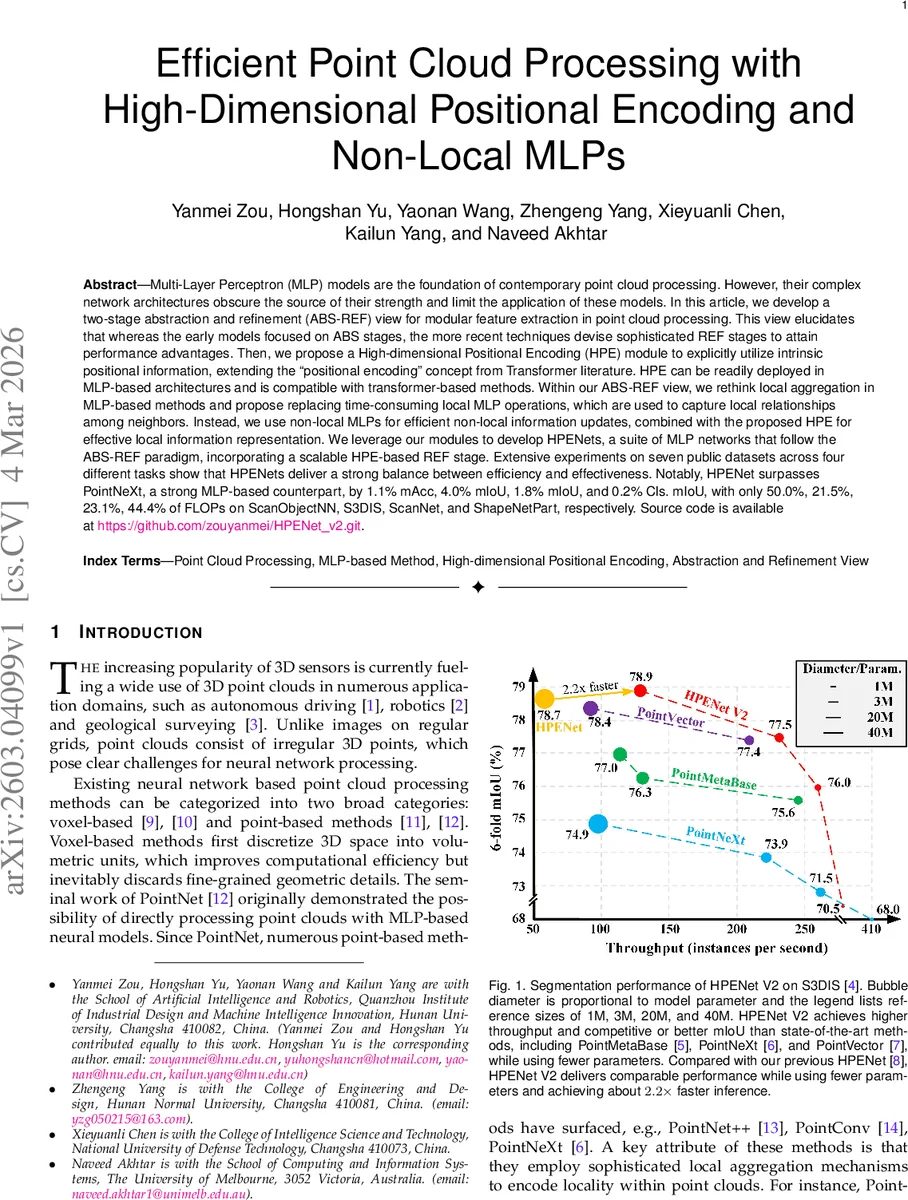
본 논문은 포인트 클라우드 처리에서 MLP 기반 모델의 구조적 복잡성을 해소하고자, 추상‑정제(ABS‑REF) 두 단계 뷰를 제안한다. 고차원 위치 인코딩(HPE) 모듈을 도입해 점들의 상대 좌표를 고차원 공간에 투사하고, 비국소 MLP를 이용해 효율적인 정보 업데이트를 수행한다. 또한 역방향 융합 모듈(BFM)로 다중 해상도 특징 간 양방향 교류를 구현한다. 제안된 HPENet·HPENet V2는 기존 MLP 기반 최고 성능 모델인 PointNeXt 대비 정확도는 상승하고 FLOPs와 파라미터 수는 크게 감소한다.
상세 분석
논문은 먼저 기존 포인트 클라우드 네트워크를 ‘추상(Abstraction, ABS)’ 단계와 ‘정제(Refinement, REF)’ 단계로 구분하는 통합적인 ABS‑REF 프레임워크를 제시한다. 초기 연구들은 주로 ABS 단계에서 복잡한 로컬 어그리게이션(예: PointNet++, PointConv)을 사용했으며 REF 단계가 거의 없었다. 반면 최신 모델들은 Transformer 기반 혹은 고도화된 MLP 구조를 통해 REF 단계에서 넓은 수용 영역과 전역 컨텍스트를 확보함으로써 성능을 끌어올렸다. 이러한 관점을 바탕으로 저자들은 두 단계에 각각 최적화된 연산을 설계한다.
핵심 기여는 고차원 위치 인코딩(HPE)이다. 기존 MLP 기반 방법들은 좌표 정보를 단순히 피처와 concatenate하는 수준에 머물렀지만, HPE는 상대 좌표를 고차원(예: 64‑256 차원)으로 매핑하고, 뒤이어 작은 MLP를 통해 특징 공간에 정렬한다. 이 과정은 translation invariance를 보장하고, 좌표 자체가 강력한 지오메트리 신호임을 명시적으로 활용한다.
또한, 전통적인 로컬 MLP 연산은 이웃 점들만을 대상으로 하여 연산량이 크게 늘어나지만, 논문은 ‘비국소 MLP’를 도입한다. 비국소 MLP는 그룹화 전에 전체 혹은 넓은 범위의 점들을 한 번에 처리해 전역 정보를 효율적으로 전달한다. 이를 ABS 단계에 적용하면 FLOPs가 크게 감소하고, REF 단계에서는 HPE와 결합된 비국소 MLP가 정교한 로컬 디테일을 보완한다.
역방향 융합 모듈(BFM)은 고해상도 피처의 통계값(max, mean)을 추출해 저해상도 피처에 삽입함으로써, 디코더에서 일방적인 피처 흐름을 양방향으로 전환한다. 이는 특히 멀티스케일 구조에서 컨텍스트 손실을 방지하고, 작은 객체나 경계 영역의 표현력을 높인다.
실험에서는 7개의 공개 데이터셋(ScanObjectNN, S3DIS, ScanNet, ShapeNetPart 등)과 4가지 태스크(객체 분류, 장면 분할, 파트 분할 등)를 대상으로 HPENet·V2를 평가한다. 결과는 PointNeXt 대비 mAcc, mIoU, Cls.mIoU 등에서 0.2‑4.0% 향상을 보이며, FLOPs는 21‑50% 수준으로 크게 절감한다. 또한, 제안 모듈을 Transformer 기반 백본(Point Transformer, Stratified Transformer)에 삽입했을 때도 각각 2.5%·1.3% mIoU 향상을 기록, HPE와 BFM이 백본에 독립적으로 유용함을 입증한다.
전체적으로 논문은 MLP 기반 포인트 클라우드 네트워크의 구조적 복잡성을 ‘추상‑정제’라는 명확한 두 단계로 재구성하고, 고차원 위치 인코딩과 비국소 MLP, 역방향 융합이라는 세 가지 경량 모듈을 통해 효율성과 정확성을 동시에 달성한다는 점에서 의미가 크다. 특히, HPE가 Transformer와도 호환된다는 점은 향후 하이브리드 아키텍처 설계에 새로운 가능성을 열어준다.
댓글 및 학술 토론
Loading comments...
의견 남기기