비강체 단일 카메라 상태 추정을 위한 물리 기반 메트릭 스케일 복원
초록
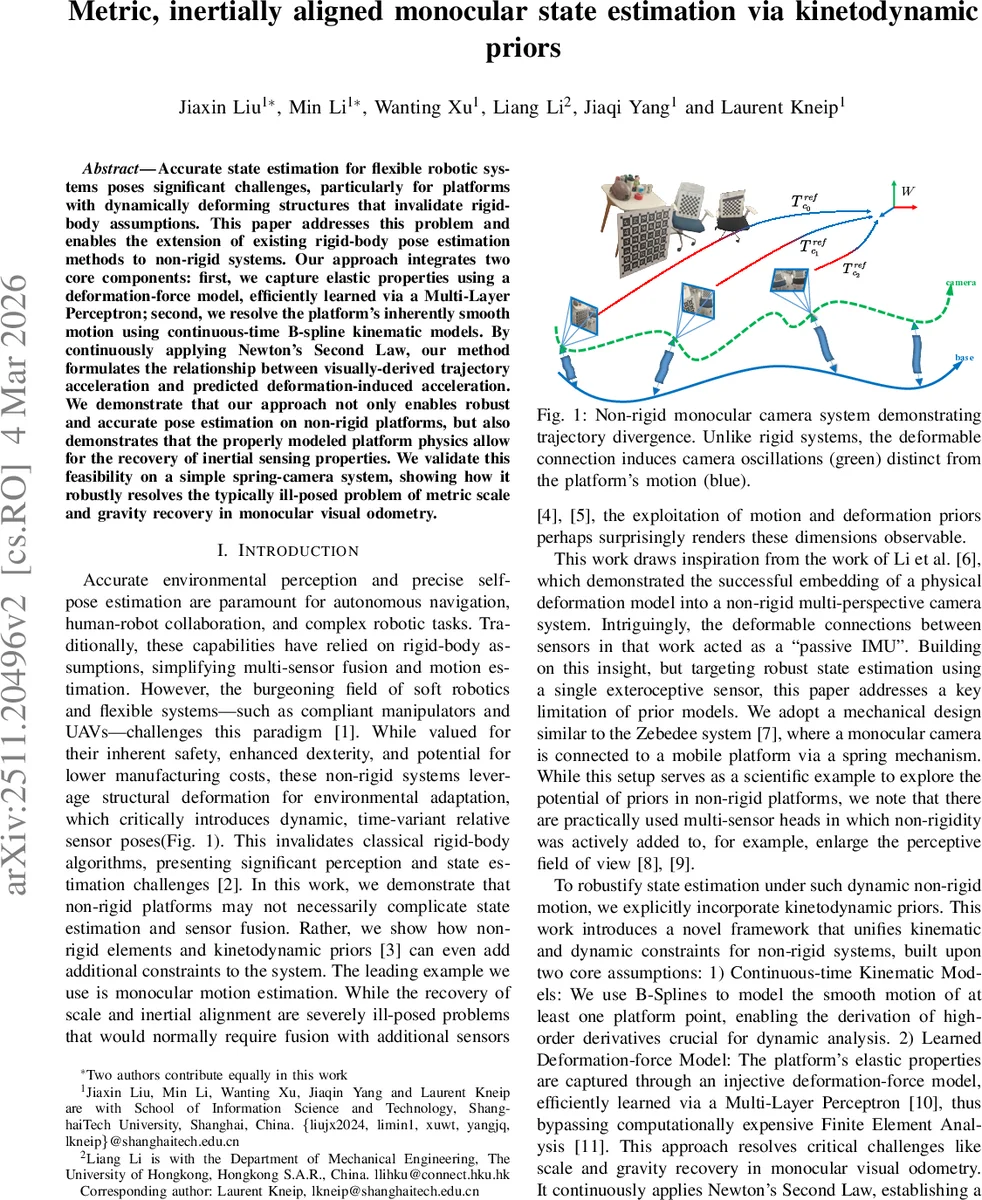
본 논문은 스프링으로 연결된 단일 카메라와 이동 플랫폼이라는 비강체 시스템에서, 신경망으로 학습한 변형‑힘 모델과 연속시간 B‑스플라인 운동 모델을 결합해 뉴턴 제2법칙을 적용함으로써 시각적 가속도와 물리적 가속도를 일치시킨다. 이를 통해 기존의 단일 카메라 비주얼 오도메트리에서 불가능했던 절대 스케일과 중력 방향을 자동으로 복원하고, 비강체 구조 자체를 수동적인 관성 센서처럼 활용한다. 실험은 스프링‑카메라 시스템과 모션 캡처 기반 그라운드 트루스를 이용해 정확도와 스케일 오류를 정량적으로 검증한다.
상세 분석
이 연구는 두 가지 핵심 아이디어를 융합한다. 첫 번째는 변형‑힘 네트워크(Deformation‑Force Network, DFN)로, 비강체 연결부(스프링)의 변형을 입력으로 받아 6‑DoF 힘·토크를 출력하는 다층 퍼셉트론(MLP)이다. 학습은 모션 캡처로 얻은 실제 가속도와 토크 데이터를 사용해 카메라 좌표계에서의 물리량을 직접 지도함으로써, 복잡한 유한요소 해석을 회피한다. 두 번째는 연속시간 B‑스플라인을 이용한 플랫폼(베이스) 궤적 파라미터화이다. B‑스플라인은 제어점만으로 부드러운 위치·속도·가속도를 제공하고, SE(3) 위에서의 로그·지수 사상을 통해 회전 가속도까지 정확히 계산한다.
뉴턴 제2법칙을 카메라 프레임에 적용하면, 시각적 오도메트리에서 얻은 가속도 (a_{c}^{vis})와 중력 (g)를 이용해 비중력 가속도 (s_c = a_{c}^{vis} - R_{c}^{w}g)를 구한다. 이 비중력 가속도는 물리적으로는 스프링이 발생시키는 힘 (f_{cs})에 비례하며, DFN이 예측한 힘·토크 ((s_c, \alpha_c))와 일치해야 한다. 여기서 스케일 변수 (s)와 회전 정렬 (R_{align})을 포함한 similarity 변환 (S_{align})을 도입해, 시각적 가속도와 물리적 가속도를 동일한 월드 프레임으로 변환한다.
목표 함수는
\
댓글 및 학술 토론
Loading comments...
의견 남기기