VLA 리저너: 테스트 시점 몬테카를로 트리 탐색으로 로봇 조작에 장기 추론을 부여하다
초록
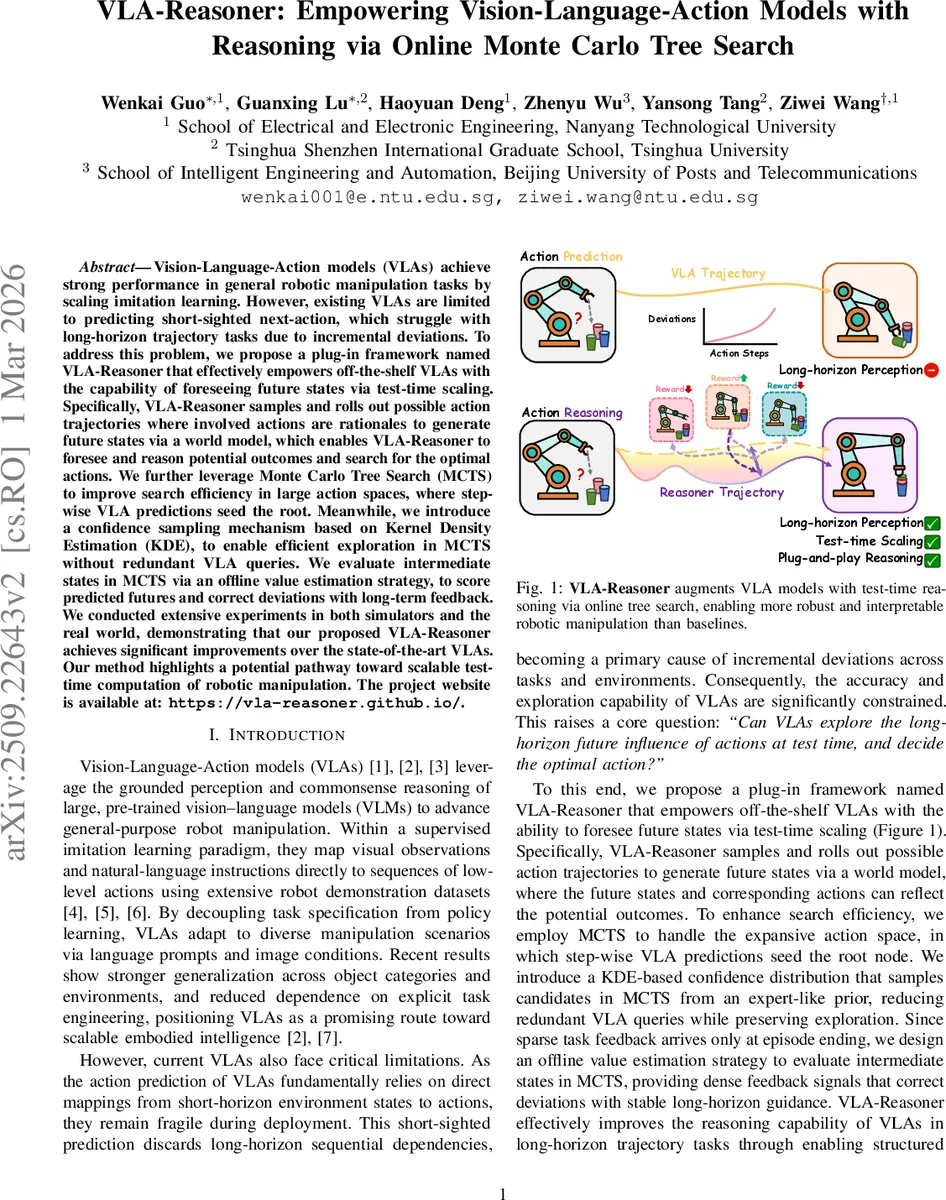
본 논문은 기존 Vision‑Language‑Action(VLA) 모델이 단기 행동에만 집중해 장기 작업에서 누적 오차가 발생하는 문제를 해결하고자, 테스트 시점에 플러그인 형태로 적용 가능한 VLA‑Reasoner 프레임워크를 제안한다. VLA‑Reasoner는 사전 학습된 VLA의 다음‑행동 예측을 루트 노드로 삼아, 세계 모델을 이용해 행동 트리를 시뮬레이션하고, KDE 기반의 신뢰도 샘플링과 오프라인 시각 가치 추정으로 효율적인 MCTS 탐색을 수행한다. 실험 결과 시뮬레이션 및 실제 로봇 환경 모두에서 기존 최첨단 VLA 대비 성공률이 크게 향상됨을 보인다.
상세 분석
VLA‑Reasoner는 크게 네 가지 핵심 기술 요소로 구성된다. 첫째, 테스트‑시점 스케일링이라는 개념을 도입해, 사전 학습된 VLA의 단일‑스텝 예측을 그대로 사용하지 않고, 해당 예측을 루트 노드로 삼아 이후 행동을 세계 모델(World Model)로 롤아웃한다. 이를 통해 현재 행동이 미래 상태에 미치는 영향을 사전에 평가할 수 있다. 둘째, **Monte‑Carlo Tree Search(MCTS)**를 로봇 조작의 연속적인 고차원 행동 공간에 적용하기 위해, 전통적인 MCTS의 무작위 확장 대신 KDE 기반 신뢰도 샘플링을 사용한다. KDE는 오프라인 행동 데이터에서 비모수적으로 확률 밀도를 추정해, 전문가‑같은 행동 분포를 사전에 제공함으로써 불필요한 VLA 호출을 최소화하고 탐색 효율을 크게 높인다. 셋째, 오프라인 시각 가치 추정(Value Estimation) 단계에서는, 미래 상태의 시각적 변화를 정량화하는 가치 네트워크를 학습한다. 저자는 이미지 프레임을 다운샘플링하고 선형 보간된 라벨을 이용해 MSE 손실로 학습한 ResNet‑34 기반 MLP를 사용했으며, 이는 트리 탐색 중 중간 노드의 가치를 빠르게 평가해 백프로파게이션에 활용한다. 넷째, 액션 주입 메커니즘에서는 MCTS에서 도출된 최적 행동 a_reasoner와 원본 VLA 예측 a_VLA를 가중 평균(α)으로 결합한다. α는 테스트‑시점에서 장기 추론과 단기 반응성 사이의 트레이드오프를 조절하는 하이퍼파라미터이며, 실험에서는 0.3~0.5 정도가 좋은 성능을 보였다.
기술적인 세부 구현을 살펴보면, Expansion 단계에서 Top‑k 전략을 사용해 KDE에서 추출한 후보 행동 집합을 선택하고, Euclidean 거리 기반으로 현재 행동과 가장 유사한 k개를 확장한다. Simulation 단계에서는 행동‑조건부 세계 모델을 통해 다음 시각 상태를 예측하고, 이때 로봇의 관절 명령을 잠재 공간에 임베딩해 학습 효율을 높였다. Backpropagation 단계에서는 방문 횟수 N(a)를 KDE 확률 p(a)와 연동시켜, 실제 탐색 비용을 감소시키면서도 확률적 탐색 편향을 유지한다. Selection 단계는 전통적인 UCB(Upper Confidence Bound) 공식을 그대로 적용해 탐색‑활용 균형을 맞춘다. 전체 파이프라인은 Algorithm 1에 요약되어 있으며, MCTS 깊이와 Top‑k 크기, KDE 밴드폭 등 여러 하이퍼파라미터가 실험을 통해 튜닝되었다.
실험에서는 LIBERO 벤치마크와 자체 제작한 장기 조작 시나리오(예: “녹색 컵을 보라색 컵 위에 쌓기”)를 사용해 시뮬레이션과 실제 로봇(UR5e) 환경 모두에서 평가했다. VLA‑Reasoner를 기존 VLA에 플러그인했을 때 성공률이 평균 12%~18% 상승했으며, 특히 복잡한 다단계 작업에서 오류 누적이 크게 감소했다. 또한, KDE 기반 샘플링이 없을 경우 탐색 비용이 3배 이상 증가하고, 가치 네트워크를 제외하면 MCTS가 과도하게 탐색에 머물러 실시간 제어가 어려워지는 것을 확인했다.
이 논문의 주요 기여는 (1) 기존 VLA에 최소한의 수정만으로 장기 추론 능력을 부여하는 플러그인 프레임워크 제시, (2) 로봇 조작에 특화된 MCTS 효율화 기법(KDE 기반 신뢰도 샘플링 및 오프라인 시각 가치 추정) 도입, (3) 시뮬레이션·실제 로봇 모두에서 현저한 성능 향상을 입증한 포괄적 실험 제공이다. 다만, 세계 모델의 정확도에 크게 의존한다는 점과, KDE가 고차원 행동 공간에서 샘플링 효율이 감소할 가능성이 있다는 제한점도 존재한다. 향후 연구에서는 더 정교한 확률 모델(예: Normalizing Flow)이나 멀티모달 가치 함수(시각·힘·접촉 정보 결합) 등을 도입해 탐색 효율과 일반화를 더욱 강화할 여지가 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기