수중 환경을 이용한 우주 로봇 검증: 교란 강인성 동등성 접근법
초록
**
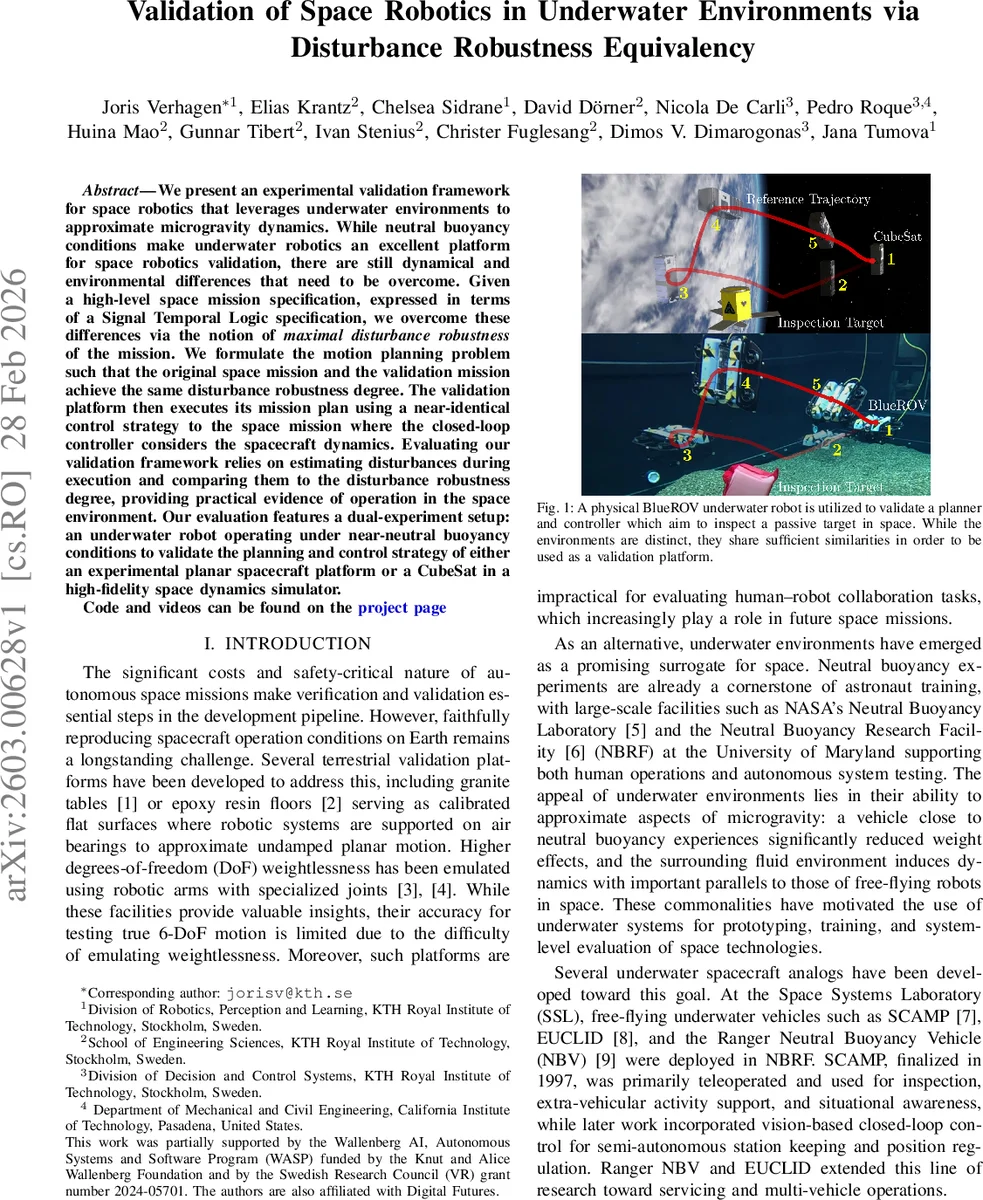
본 논문은 중성 부양 수중 실험을 활용해 우주 로봇의 임무 계획 및 제어를 검증하는 프레임워크를 제안한다. 임무 사양을 STL로 표현하고, 교란 강인성 정도를 동일하게 맞춤으로써 수중 로봇과 우주 로봇이 동일한 로봇‑시스템 강인성을 보유하도록 설계한다. 실험은 BlueROV 수중 로봇과 평면 우주 플랫폼·CubeSat 시뮬레이터를 이용해 두 시나리오를 검증한다.
**
상세 분석
**
이 연구는 우주 로봇 검증에 있어 가장 큰 난관인 ‘지구 중력과 미세중력 사이의 동역학 차이’를 형식적인 강인성 매칭을 통해 극복한다는 점에서 혁신적이다. 먼저 임무를 Signal Temporal Logic(STL)으로 기술하고, STL의 정량적 의미인 공간 강인성(robustness)을 이용해 교란에 대한 허용 한계를 수치화한다. 논문은 교란 강인성(degree of disturbance robustness)을 “최대 스케일링 팩터 α*”로 정의하고, 이를 플래너의 목적함수에 포함시켜 α*를 최대화한다. 이렇게 하면 플래너는 단순히 사양을 만족하는 궤적을 찾는 것이 아니라, 가능한 가장 큰 외란 집합을 견딜 수 있는 궤적을 생성한다.
플래닝 단계에서는 6‑DoF 우주 로봇의 선형화 모델(M_spL)을 사용해 Mixed‑Integer Linear Programming(MILP) 형태로 STL 제약을 인코딩한다. 여기서 중요한 점은 실제 비선형 로봇이 사용할 수 있는 제어 입력 집합 U_sp을, 최악의 외란을 보정한 후 남는 ‘유효 제어 집합’으로 축소한다는 것이다. 이는 제어 입력이 외란을 상쇄하기 위해 일정 부분을 예약해야 함을 수학적으로 표현한다.
제어 측면에서는 모델 예측 제어(MPC)를 기반으로 한 피드백 등가성(feedback equivalence)을 주장한다. 수중 로봇과 우주 로봇 모두 동일한 구조의 MPC를 적용하고, 외란 추정기를 통해 실시간으로 d_uw를 측정한다. 추정된 외란이 사전에 계산된 D* (α*·D) 안에 있으면, 수중 실험 결과가 우주 환경에서의 성공 가능성을 직접적으로 증명한다는 논리적 연결고리를 제공한다.
실험은 두 가지 시나리오로 구성된다. 첫 번째는 2‑D 평면 검사 임무로, BlueROV와 물리적 평면 우주 플랫폼 간의 궤적 및 STL 만족도를 비교한다. 두 번째는 3‑D 검사 임무로, BlueROV와 고정밀 우주 시뮬레이터(CubeSat) 사이의 교란 강인성을 매칭한다. 결과는 두 플랫폼 모두 동일한 α* 값을 달성했으며, 실제 측정된 외란이 D* 범위 내에 머물렀음을 보여준다. 이는 수중 실험이 우주 로봇의 미세중력 동작을 신뢰성 있게 대체할 수 있음을 실증한다.
한계점으로는 (1) 교란이 ‘매치드( matched)’라는 가정이 현실적인 수중 환경(예: 난류, 비선형 유동)에서는 완전히 성립하지 않을 수 있다. (2) 선형화된 플래너가 비선형 동역학을 완전히 포착하지 못해, 실제 실행 시 작은 궤적 편차가 발생한다. (3) 현재는 6‑DoF 전역적인 미세중력 상황을 완전 재현하지 못하고, 주로 근접 중성 부양 상태에 의존한다는 점이다. 향후 연구에서는 비매치드 외란 모델링, 비선형 플래너 통합, 그리고 다중 로봇 협업 시나리오까지 확장하는 것이 필요하다.
**
댓글 및 학술 토론
Loading comments...
의견 남기기