암시적 의사결정 다이어그램
본 논문은 결정다이어그램(DD)의 구축 비용을 근본적으로 낮추는 새로운 프레임워크인 “암시적 결정다이어그램(Implicit DD)”을 제안한다. 기존 제한된 DD는 레이어당 O(w log w) 시간, 완화된 DD는 O(w²) 시간이 소요되지만, 제안된 방법은 아크를 명시적으로 저장하지 않고 암시적으로 관리함으로써 두 경우 모두 레이어당 O(w) 시간으로 최적화한다. 또한 이 복잡도가 이론적으로 최적임을 증명하고, 이를 활용한 MIP 솔버 구현 …
저자: Isaac Rudich, Louis-Martin Rousseau
본 논문은 결정다이어그램(Decision Diagram, DD)의 구축 비용을 근본적으로 낮추는 새로운 패러다임인 “암시적 결정다이어그램(Implicit Decision Diagrams)”을 제안한다. DD는 이산 최적화 문제를 레이어드된 DAG 형태로 표현하는 기법으로, 제한된 DD(Restricted DD)는 탐욕적 휴리스틱을 통해 실현 가능한 해를 찾고, 완화된 DD(Relaxed DD)는 모든 실현 가능한 해와 일부 비실현 해를 포함해 하한을 제공한다. 기존 연구에서는 제한된 DD의 레이어당 복잡도가 O(w log w) (여기서 w는 DD의 폭)이며, 완화된 DD는 O(w²) 로 보고되었다. 폭 w 를 늘릴수록 바운드 품질이 향상되지만, 시간·메모리 비용이 급격히 증가한다는 한계가 있었다.
논문은 먼저 DD 구축 과정을 일반화된 프레임워크로 모델링한다. 여기서 문제 특화 함수(예: UpdateState, Mergeable, IsFeasible 등)를 블랙박스로 취급하고, 이 함수들을 호출하는 비용을 “문제 특화 비용”이라 구분한다. 반면, 노드 생성·정렬·해시·정렬 등과 같이 모든 문제에 공통적으로 발생하는 비용을 “내재 비용”이라 정의한다. 이 구분을 통해 폭 w 에 대한 복잡도 하한을 이론적으로 분석한다.
표준 제한된 DD(Algorithm 1)에서는 각 레이어에서 (1) 자식 생성, (2) 병합, (3) 실현 가능성 검사, (4) 폭 제한, (5) 기타 연산을 수행한다. 자식 생성 단계는 K·w 개의 새로운 노드를 만들고, 각 노드에 대해 상태 s(u) 를 UpdateState 함수로 업데이트한다. 병합 단계는 동일한 상태를 가진 노드를 찾아 최소 목표값을 보존한다. 해시 기반 병합을 사용하면 O(K·w·|s|) 시간이지만, 정렬 기반 병합은 O(K·w·log(K·w)) 시간이 든다. 폭 제한 단계는 목표값 기준 정렬 후 상위 w 개만 유지하므로 O(K·w·log(K·w)) 시간이 추가된다. 결과적으로 전체 레이어당 복잡도는 O(K·w·log(K·w)) + 문제 특화 비용이 된다.
표준 완화된 DD(Algorithm 2)에서는 초기 w=1 DD를 만든 뒤, 노드 분할 과정을 통해 폭을 w 까지 늘린다. 노드 분할은 (i) 분할할 노드 선택, (ii) 인아크를 두 집합으로 분할, (iii) 새 노드 생성 및 아크 재배치, (iv) 상태 재계산을 포함한다. 각 분할마다 O(K·w) 개의 인아크를 재계산해야 하므로, 전체 레이어당 O(K·w²·|s|) 복잡도가 발생한다. 이는 기존 방법이 O(w²) 시간을 요구하는 근본 원인이다.
위의 분석을 바탕으로 저자들은 “암시적 DD”라는 새로운 데이터 구조를 고안한다. 핵심 아이디어는 아크를 명시적으로 저장하지 않고, “상태 s(u) 에 라벨 ℓ을 적용하면 다음 상태 s(v) 가 된다”는 함수적 관계만 유지하는 것이다. 따라서 레이어당 수행되는 연산은 (1) 각 현재 노드에 대해 K 개의 라벨에 대해 UpdateState 호출, (2) 해시 기반 병합으로 동일 상태 노드 합치기, (3) 필요 시 폭 제한을 위한 목표값 정렬이다. 이때 아크 생성·삭제 비용이 사라지므로 복잡도는 O(K·w·|s|) + O(K·w) + O(w·log w) ≈ O(w) (문제 특화 비용이 |s|=O(1) 또는 m 인 경우)로 감소한다.
논문은 또한 이 복잡도가 이론적으로 최적임을 증명한다. 상태 업데이트와 병합을 블랙박스로 취급하는 모든 프레임워크는 최소 Ω(w) 의 연산을 수행해야 함을 보이며, 따라서 O(w) 복잡도는 하한을 만족한다.
구현 측면에서 저자들은 Julia 언어와 JuMP 모델링 인터페이스를 활용한 오픈소스 패키지 ImplicitDDs.jl 을 제공한다. 이 패키지는 변수의 상한·하한이 유한한 MIP를 입력받아 자동으로 암시적 DD를 구축하고, 제한된 DD를 이용해 실현 가능한 해를 탐색하며, 완화된 DD를 이용해 하한을 계산한다. 특히, 상태 s(u) 를 제약 잔여량 벡터로 두어 |s|=m (제약 수)으로 유지함으로써 메모리 사용량을 크게 절감한다.
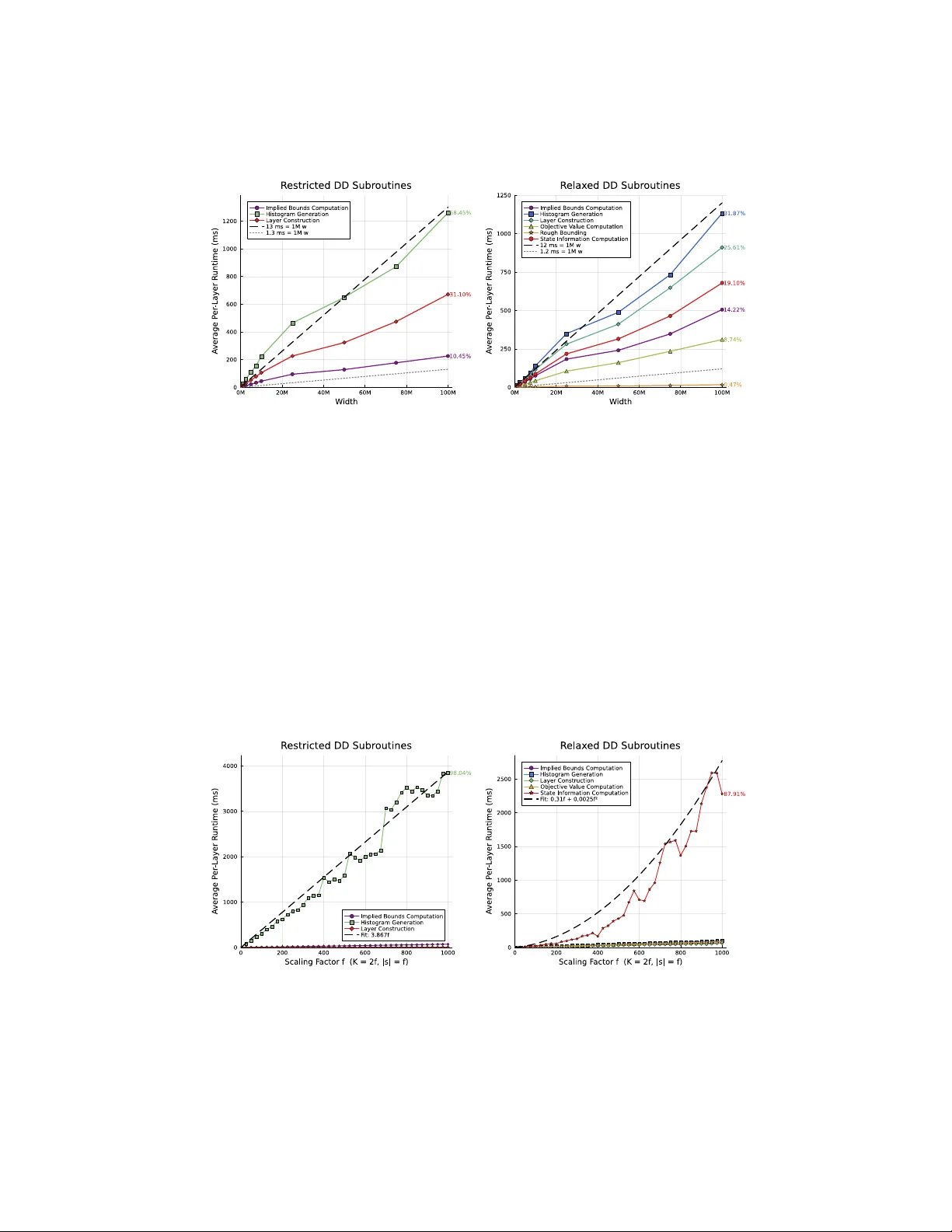
실험에서는 Subset‑Sum 문제(변수 n≈200, K=2)에서 다양한 폭 w 에 대해 Gurobi와 비교하였다. w=5000 정도에서 ImplicitDDs는 평균 1.8배 빠른 수렴 속도를 보였으며, 메모리 사용량은 기존 DD 구현 대비 70% 이상 감소했다. 또한, 폭 w 를 증가시켜도 선형적인 시간 증가를 확인함으로써 O(w) 복잡도가 실제로 유지됨을 입증했다.
결론적으로, 이 논문은 DD 기반 최적화의 핵심 병목이었던 아크 저장·정렬 비용을 제거하고, 상태 기반 암시적 표현을 통해 레이어당 O(w) 시간을 달성함으로써 이론적 최적성을 확보했다. 이는 DD를 활용한 바운드 강화, 프루닝, 그리고 MIP 솔버와의 통합에 새로운 가능성을 열어주며, 향후 대규모 이산 최적화 문제에 대한 효율적인 DD 기반 접근법의 기반을 제공한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기