전후속 항공 운용을 위한 새로운 공역 복잡도 지표
본 논문은 전후속(predecessor‑follower) 항공기 쌍의 수평 간격과 간격 변화율을 연속적인 함수 형태로 결합한 ‘쌍별 동적 작업부하(PDW)’ 지표를 제안한다. PDW는 기존 동적 밀도(DD)와 비교했을 때 시간에 따라 변하는 복잡도를 정량화하고, 충돌 위험이 발생하기 전 조기 경고가 가능함을 시뮬레이션을 통해 입증한다.
저자: Lucas Souza e Silva, Luis Rodrigues
본 논문은 급증하는 항공 교통량과 도심 항공 모빌리티(UAM) 등 새로운 운용 요구에 대응하기 위해, 전후속(predecessor‑follower) 항공기 쌍의 동적 상호작용을 정량화하는 새로운 공역 복잡도 지표인 ‘쌍별 동적 작업부하(PDW)’를 제안한다. 서론에서는 항공 교통관제사의 업무 부담이 증가하고, 기존 복잡도 지표가 간격이나 속도 변화만을 부분적으로 고려하거나 폐쇄형 수식이 부재함을 지적한다. 이에 따라, 저자들은 두 항공기 사이의 수평 간격 \(d_{i,i-1}\)와 그 변화율 \(\dot d_{i,i-1}=v_{i-1}-v_i\)를 동시에 반영하는 식(1)을 도출한다. 이 식은 다음과 같은 특성을 가진다. ① \(d\)가 작아질수록 \(\chi\)가 커져 관제사의 주의 필요성이 증가한다. ② \(\dot d\)가 음수(수렴)일 때 \(\partial\chi/\partial d\)가 더 크게 음수이며, 이는 수렴 상황에서 작업부하가 급격히 상승함을 의미한다. ③ \(\dot d\)가 양수(발산)일 때 \(\partial\chi/\partial \dot d\)가 음수이므로, 발산 상황에서는 작업부하가 감소한다. 미분식(2)와 (3)은 각각 \(d\)와 \(\dot d\)에 대한 기울기를 명시적으로 보여 주어, 지표가 물리적 직관과 일치함을 확인한다.
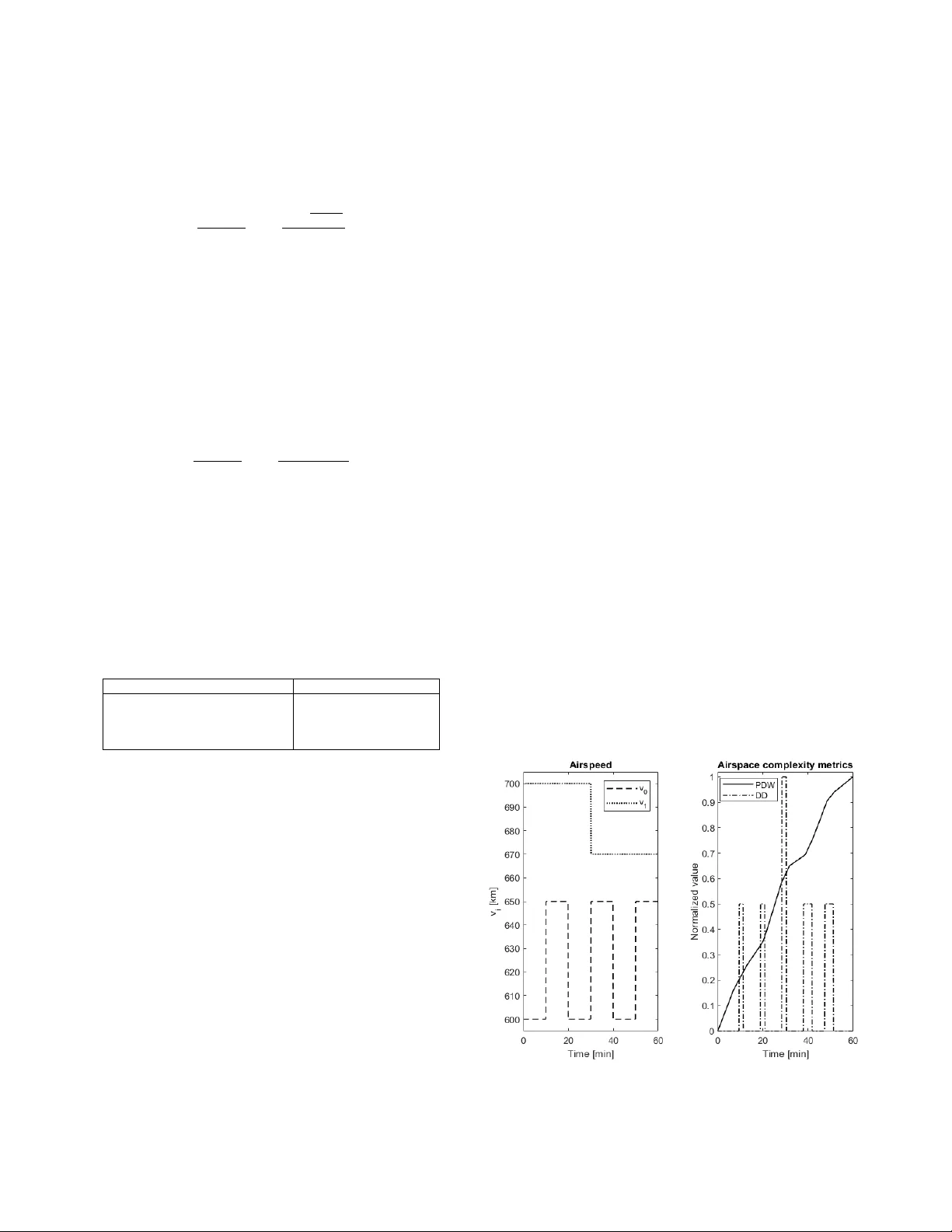
다음으로, 제안된 PDW를 기존 동적 밀도(DD)와 비교하기 위해 두 가지 시나리오를 설계하였다. 시나리오 1은 전후속 항공기가 수렴(converging)하도록 속도 프로파일을 설정했으며, 시나리오 2는 발산(diverging)하도록 반대로 설정하였다. 각 시나리오는 60분 동안 진행되었고, 속도 변동은 10분 구간마다 단계적으로 바뀌어 다양한 \(\dot d\) 값을 생성하였다. 시뮬레이션은 MATLAB 환경에서 16 GB RAM, 11세대 Intel i5 CPU를 사용해 수행되었다.
시뮬레이션 결과는 다음과 같다. DD는 2분 구간마다 속도 변동 횟수만을 카운트하기 때문에 두 시나리오에서 동일한 값을 보였다. 반면 PDW는 시간에 따라 연속적으로 변하며, 수렴 구간에서는 값이 급격히 상승하고 발산 구간에서는 감소하였다. 특히, PDW는 간격이 감소하고 \(\dot d\)가 크게 음수일 때 기울기가 급격히 가팔라져, 잠재적 충돌 위험을 조기에 포착할 수 있음을 보여준다. 이는 DD가 간격 정보를 전혀 반영하지 못하는 한계를 극복한 것이다.
결론에서는 PDW가 기존 지표보다 더 세밀하게 공역 복잡도를 파악하고, 실시간으로 관제사의 업무 부담을 추정할 수 있음을 강조한다. 또한, 폐쇄형 수식 형태이므로 ATMS, 시뮬레이터, 혹은 자율 항공기 시스템에 손쉽게 통합 가능하며, \(\dot d_{\max}\) 파라미터만 조정하면 다양한 운용 환경에 적용할 수 있다. 향후 연구로는 다중 항공기 군집, 고도 변화, 기상 요인 등을 포함한 확장 모델링과 실제 운용 데이터에 대한 검증이 제시된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기