각도 기반 초파일럿 교차배치로 OTFS 채널의 소수 지연·도플러 추정
본 논문은 대규모 ULA를 이용한 다중 안테나 OTFS 수신기에서, 파일럿을 교차(superimposed cross‑pilots) 형태로 삽입해 데이터‑파일럿 간 간섭을 평균화로 억제하고, 통합된 지연·도플러 프로파일을 이용해 소수(프랙셔널) 지연·도플러 값을 저복잡도로 추정하는 새로운 채널 추정 방식을 제안한다. 시뮬레이션 결과, 기존 초파일럿 방식보다 BER이 크게 개선되며 PAPR‑성능 트레이드오프도 분석한다.
저자: Mauro Marchese, Pietro Savazzi
본 논문은 차세대 무선 통신에서 주목받고 있는 OTFS(Orthogonal Time Frequency Space) 변조 방식을 다중 안테나 수신기와 결합한 채널 추정 문제를 다룬다. 기존 연구에서는 대규모 균일선형 배열(ULA)을 이용해 각도 도메인에서 다중 경로를 직접 분리하고, 정수형 지연·도플러를 가정한 파일럿 삽입 방식을 사용했지만, 실제 고속 이동 환경에서는 소수(프랙셔널) 지연·도플러가 존재해 성능 저하가 불가피했다.
이에 저자는 “초파일럿 교차‑파일럿”(superimposed cross‑pilots)이라는 새로운 파일럿 설계 방식을 제안한다. 전통적인 다중 초파일럿 방식은 파일럿을 서로 다른 지연·도플러 위치에 독립적으로 배치하지만, 교차‑파일럿은 M개의 지연 인덱스와 N개의 도플러 인덱스를 각각 전부 포함하도록 파일럿을 교차 배치한다. 구체적으로 파일럿 행렬 Xₚ는 (1 ⊗ eₘₚ)+(eₙₚ ⊗ 1ₘ) 형태이며, 파일럿 수는 M+N−1이 된다. 이 구조는 파일럿이 서로 겹치지 않으면서도 모든 지연·도플러 축을 커버해, 소수 파라미터에 의한 스펙트럼 확산을 최소화한다.
수신 측에서는 대규모 ULA를 가정하고, 각 DoA θₚ에 대해 빔포밍(맞춤 필터)으로 경로를 분리한다. 이후 DZT(Discrete Zak Transform)를 적용해 지연‑도플러 행렬 Yₚ를 얻고, 행·열 평균을 통해 통합 지연 프로파일 uₚ와 통합 도플러 프로파일 vₚ를 각각 계산한다. 수식 (10)·(11)에서 보듯, uₚ는 모든 도플러 차원을 평균하고, vₚ는 모든 지연 차원을 평균한다. 이 평균 과정은 데이터 심볼이 갖는 간섭 전력을 각각 N·M 배만큼 감소시키며, N·M이 커질수록 데이터‑파일럿 간 간섭이 거의 사라진다. 또한 AWGN도 동일 비율로 감소해 실제 SNR이 향상된다.
통합 프로파일에 대한 수학적 전개는 Lemma 1·2에서 상세히 증명된다. 파일럿 기여 항은 α·Eₚ·gᵤ(l,k)·(또는·gᵥ(k)) 형태로 나타나며, 여기서 gᵤ, gᵥ는 DFT와 지연·도플러 회전 행렬을 결합한 함수이다. 도플러가 작아 ICI가 무시될 수 있는 경우(k ≪ N)에는 도플러 프로파일이 지연에 독립적이므로, 도플러 추정은 vₚ와 사전 정의된 템플릿 gᵥ(k)와의 상관을 최대화하는 매치드 필터(MF) 연산으로 수행된다. 반면 지연 프로파일은 도플러 회전이 남아 있기 때문에, 먼저 도플러를 추정한 뒤 (26)·(27)과 같이 두 단계(정수 부분 추정 → 소수 정밀 탐색)로 지연을 추정한다.
알고리즘 1은 전체 흐름을 요약한다. 1) 각 DoA θₚ에 대해 빔포밍 후 DZT 변환을 수행하고, 2) uₚ·vₚ를 얻은 뒤 MF를 통해 ˆkₚ와 ˆlₚ를 구한다. 3) 최종적으로 LS(최소제곱) 방식을 이용해 경로 이득 αₚ를 추정한다. 복잡도는 O(P·M·N·Nᵣ)이며, Nᵣ≫log₂N인 대규모 안테나 가정 하에 공간 처리 비용이 지배적이므로 선형 확장성을 가진다.
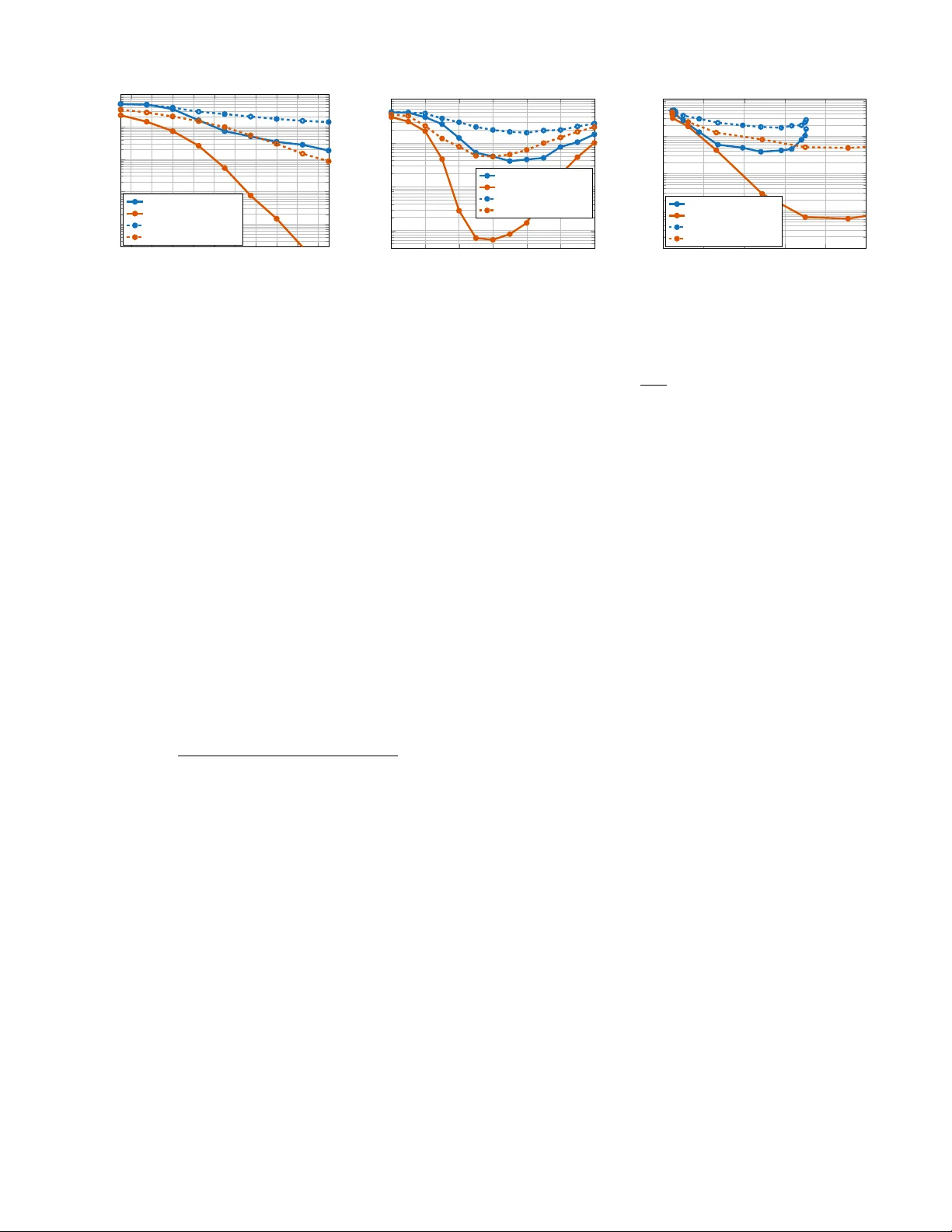
시뮬레이션 설정은 다음과 같다. carrier = 5.9 GHz, Δf = 30 kHz, M = 64 subcarriers, N = 16 time slots, Nᵣ = 32 안테나, P = 4 경로, 최대 속도 500 km/h(도플러 ≈ ±2 kHz) 및 소수 지연을 포함한다. 비교 대상은 기존 다중 초파일럿 방식
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기