동적 서명 그래프 기반 개방형 다중 에이전트 시스템의 안정성
본 논문은 협력·적대 관계가 혼재된 서명 그래프 위에서, 에이전트의 입·출 및 연결 구조 변화가 발생하는 개방형 다중 에이전트 시스템(OMAS)의 동기화 문제를 다룬다. 서명 에지‑라플라시안에 대한 새로운 Lyapunov 함수 구축을 통해, 구조적 균형 여부와 리더 그룹 구성에 따라 평범한 합의, 양극 합의, 포함(containment) 등 다양한 형태의 동기화가 전역적으로 실현됨을 증명한다.
저자: Pelin Sekercioglu, Angela Fontan, Dimos V. Dimarogonas
본 논문은 개방형 다중 에이전트 시스템(OMAS)에서 협력과 적대가 혼재된 서명 그래프를 기반으로 한 동기화 문제를 포괄적으로 다룬다. 서론에서는 OMAS가 사회 네트워크, 로봇 군집, 센서 네트워크 등 다양한 분야에서 나타나는 현실적인 현상임을 강조하고, 기존 연구들은 주로 무부호(positive‑only) 혹은 정적 토폴로지를 전제로 했던 반면, 본 연구는 서명(positive/negative) 및 동적(노드·에지 추가·제거, 서명·방향 전환) 특성을 동시에 고려한다는 점에서 차별성을 갖는다.
첫 번째 주요 기여는 서명 다이그래프를 스위칭 시스템으로 모델링한 것이다. 각 스위칭 모드 ϕ∈P는 현재 네트워크의 노드 수 N_ϕ와 에지 수 M_ϕ, 그리고 서명 인접 행렬 A^ϕ를 정의한다. 에이전트 i의 상태 x_i는 1차 동역학 ˙x_i = u_i 로 기술되며, 분산 제어 입력은 u_i = −k₁∑_{j}|a^ϕ_{ij}|(x_i − sign(a^ϕ_{ij})x_j) 로 설정된다. 이 제어법칙은 기존의 서명 합의 프로토콜을 그대로 적용하면서, 서명 라플라시안 L_s^ϕ와 에지 라플라시안 L_e^ϕ를 통해 시스템 전체를 행렬 형태로 표현한다.
다음으로, 서명 라플라시안의 구조적 특성을 분석한다. 서명 그래프가 구조적으로 균형(SB)인 경우, 정점 집합을 두 개의 파티션 V₁, V₂ 로 나눌 수 있으며, 같은 파티션 내에서는 양의 가중치, 파티션 간에서는 음의 가중치가 존재한다. 반대로 구조적으로 불균형(SUB)인 경우 이러한 분할이 불가능하고, 전체 네트워크는 단일 합의로 수렴한다. 저자는 이러한 균형 특성을 라플라시안의 영고유공간 차원과 연결시켜, SB 그래프에서는 영고유값이 두 개(양극 합의를 위한 두 축)이고, SUB 그래프에서는 하나만 존재함을 보인다.
핵심 이론적 결과는 두 단계로 전개된다. 첫 번째 단계에서는 서명 에지‑라플라시안 L_e^s 가 다중 영고유값을 가질 때도, 각 영고유벡터에 대해 엄격한 Lyapunov 함수 V_ϕ(t,ξ)=ξᵀP_ϕξ (P_ϕ>0) 를 구성할 수 있음을 증명한다. 여기서 ξ는 에지 상태와 가중 평균 사이의 오차 벡터이며, P_ϕ는 L_e^s 의 영공간 직교 보완 부분에 대한 양의 정부호 행렬이다. 두 번째 단계에서는 스위칭 신호 σ(t)의 전이‑의존 평균 체류 시간 τ_{ϕ,ĥϕ} 를 도입하여, 각 전이 구간에서 V_ϕ 가 감소하고 전이 후에도 V_ĥϕ 가 일정 비율(Ω_{ϕ,ĥϕ}>1) 이하로 유지되는 조건을 제시한다. 이 조건을 만족하면, 전역적으로 균일 실용 안정성(Global Uniform Practical Stability)이 보장된다.
리더 그룹에 대한 분석도 상세히 이루어진다. 리더 그룹은 루트 노드 혹은 루트 SCC(Strongly Connected Component) 로 정의되며, SB‑루트 SCC와 SUB‑루트 SCC 로 구분된다. 단일 리더 그룹이 존재하면, 해당 그룹의 상태가 전체 네트워크의 기준점이 되어, SB 경우 양극 합의, SUB 경우 평범한 합의가 이루어진다. 다중 리더 그룹이 존재하면, 각 그룹이 독립적인 기준점을 제공하고, 팔로워들은 이들 기준점이 정의하는 다각형(또는 다면체) 영역 안에 수렴한다. 이는 기존의 합의 개념을 일반화한 ‘포함(containment)’ 현상으로, 리더 그룹 수 m 와 영고유값 차원의 관계를 통해 정량적으로 설명된다.
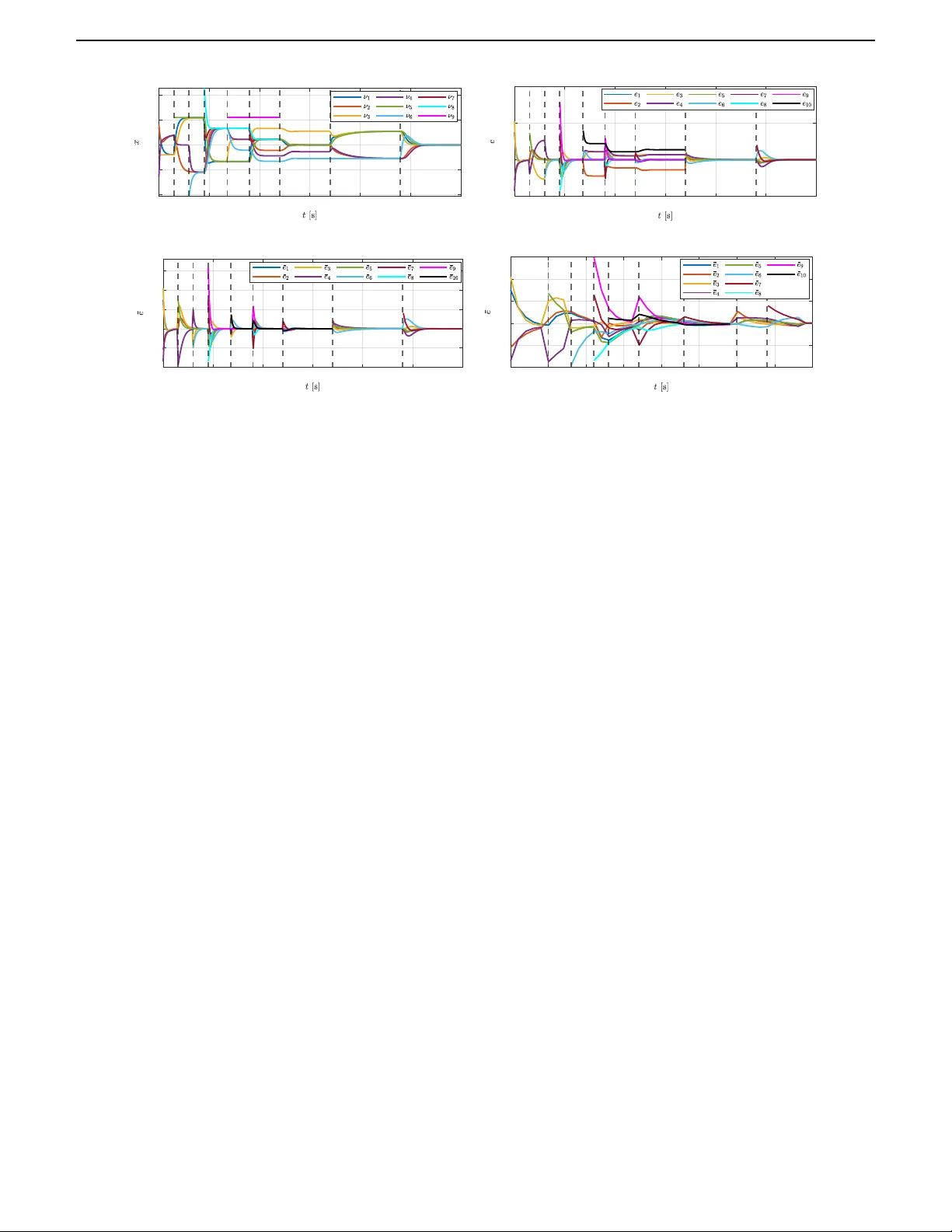
수치 시뮬레이션에서는 9개의 노드와 3개의 리더 그룹을 가진 서명 다이그래프를 사용하였다. 시뮬레이션은 (1) 새로운 노드가 추가될 때, (2) 기존 노드가 탈퇴할 때, (3) 에지의 부호가 전환될 때, (4) 리더 그룹이 재구성될 때 네 가지 시나리오를 다루었다. 각 경우 모두 제안된 제어법칙이 Lyapunov 함수 감소를 보이며, 시스템이 예상된 합의 혹은 포함 상태에 빠르게 수렴함을 확인하였다. 특히, 리더 그룹이 추가·삭제될 때 영고유공간 차원이 변함에도 불구하고, 평균 체류 시간 조건만 충족하면 안정성이 유지되는 점이 강조된다.
결론적으로, 본 연구는 동적 서명 다이그래프 위의 개방형 다중 에이전트 시스템에 대한 포괄적인 안정성 이론을 제공한다. 서명 라플라시안의 다중 영고유값 처리, 전이‑의존 평균 체류 시간 기반 스위칭 안정성, 그리고 리더 그룹에 따른 다양한 동기화 형태(합의, 양극 합의, 포함)를 통합적으로 분석함으로써, 향후 사회·로봇·센서 네트워크 등에서 복합적인 협·적대 관계와 네트워크 변동성을 동시에 고려한 제어 설계에 중요한 이론적 토대를 마련한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기