모바일 로봇 무동작 물리적 결합을 위한 중앙 MPC 기반 접근법
본 논문은 두 대의 전방향 휠 로봇이 초기 위치와 자세에 관계없이 움직이는 상태에서 전자석 도킹 인터페이스를 이용해 물리적으로 결합하도록 하는 중앙 집중형 모델 예측 제어(MPC) 방식을 제안한다. 도킹 축, 정렬, 상대 속도 등 3단계 접근 전략을 제시하고, 도킹 인터페이스 제약을 수학적으로 모델링하여 시뮬레이션에서 비결합 방식 대비 약 20 %의 시간·에너지 절감을 입증한다.
저자: Lars Fischer, Daniel Flögel, Sören Hohmann
본 논문은 물류 자동화에서 로봇 간의 효율적인 물품 이동을 목표로, 두 대의 전방향 휠 로봇이 움직이는 상태에서 물리적으로 결합(in‑motion physical coupling)할 수 있는 제어 방법을 제시한다. 서론에서는 현재 물류 로봇이 직면한 유연성·재구성성 부족 문제를 지적하고, 물리적 결합을 통해 ‘인‑모션 트랜스퍼’를 구현하면 적재량·에너지·시간 효율이 크게 향상될 수 있음을 설명한다. 기존 연구를 검토한 결과, 논리적 결합(formation control)과 물리적 결합(physical coupling) 모두 도킹 인터페이스와 접근 전략을 모델링하지 않아 실제 결합이 불가능하거나 초기 상태에 크게 의존한다는 공통된 한계가 있음을 확인한다.
이에 저자들은 두 로봇 모두 제어 가능한 중앙 모델 예측 제어(MPC) 프레임워크를 설계한다. 먼저 로봇을 반지름 r의 원형 본체와 외곽에 배치된 사각형 전자석 도킹 인터페이스로 모델링한다. 로봇의 상태는 (pₓ, p_y, θ)로 정의되고, 입력은 (vₓ, v_y, ω)이며, 이산식 Euler‑Forward 방정식 x_{k+1}=x_k+ΔT·u_k 로 동역학을 기술한다. 도킹 인터페이스의 방향은 δφ에 의해 결정되며, 이를 통해 도킹 축 θᵈ와 인터페이스 중심 pᵈ를 계산한다.
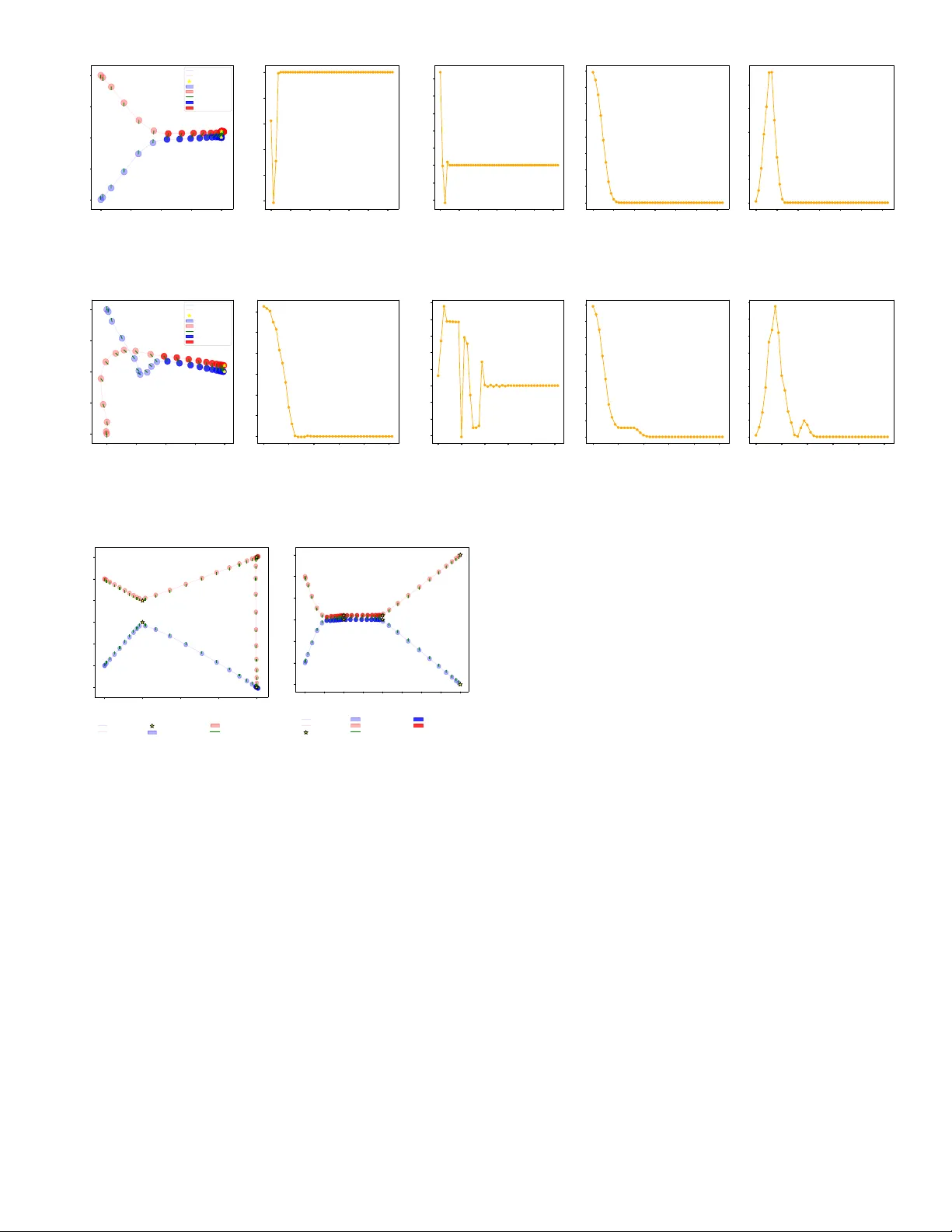
다음으로 우주선의 rendezvous‑docking 절차를 차용해 세 단계 접근 전략을 제시한다. 1) 원거리 랭귀지 단계에서는 로봇2가 로봇1의 도킹 축을 목표점으로 삼고 동시에 축을 정렬한다. 2) 근거리 랭귀지 단계는 ‘클로징’과 ‘파이널 어프로치’로 세분화되며, 여기서는 도킹 인터페이스 간 거리를 감소시키고 상대 속도를 최소화해 부드러운 결합을 준비한다. 3) 도킹 단계에서는 전자석을 활성화해 물리적 결합을 완성한다.
각 단계마다 필요한 제약을 수식화한다. 도킹 축 제약(θ₁ᵈ‑φ₁₂=0)은 로봇2가 로봇1의 도킹 축에 정확히 위치하도록 강제하고, 정렬 제약(Δθᵈ‑π=0)은 두 인터페이스가 서로 마주보게 만든다. 또한 상대 거리·속도 제약을 통해 충돌을 방지하고, 최종 도킹 시에는 결합 후 슬랙이 없도록 추가 제약을 부과한다. 이러한 제약들은 모두 MPC 최적화 문제의 제약조건으로 포함된다.
시뮬레이션에서는 다양한 초기 위치·방향 조합에 대해 100 % 성공률을 보였으며, 비결합 시나리오와 비교해 평균 19.75 %의 시간 절감과 21.04 %의 에너지 절감을 달성했다. 결과는 물류 현장에서 로봇이 실시간으로 물품을 교환·재배치할 수 있는 가능성을 시사한다.
논문의 주요 기여는 (1) 전방향 휠 로봇에 대한 정확한 동역학·도킹 인터페이스 모델링, (2) 우주선 접근 전략을 모바일 로봇에 맞게 재구성한 단계별 접근법, (3) 중앙 MPC를 통한 전역 최적화와 제약 만족을 동시에 달성한 제어 프레임워크이다. 한편, 실제 하드웨어 구현, 통신 지연, 장애물 회피 등 실운용 환경에 대한 추가 연구가 필요하다는 점을 인정한다. 향후 연구에서는 분산형 MPC, 다중 로봇 확장, 다양한 도킹 메커니즘 적용 등을 통해 시스템의 확장성과 견고성을 강화할 계획이다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기