킬로헤르츠 NMPC를 위한 쿠프만 박스QP 프레임워크
본 논문은 고차원 쿠프만 모델을 학습하고, 이를 다중 단계 예측에 활용해 상태·입력 변수를 포함하는 구조화된 박스 제약 이차계획문제(BoxQP)로 변환한다. 이후 구조를 이용한 Feasible Mehrotra 내부점법을 설계·워밍스타트와 결합해 1 kHz 수준의 실시간 해결 능력을 입증한다.
저자: Liang Wu, Wallace Gian Yion Tan, Richard D. Braatz
본 논문은 실시간 제어 분야에서 가장 큰 난제 중 하나인 대규모 비선형 모델 예측 제어(NMPC)를 킬로헤르츠(kHz) 수준의 샘플링 주기로 해결하기 위한 새로운 프레임워크 “쿠프만‑BoxQP”를 제시한다. 먼저, 데이터‑드리븐 EDMD(Extended Dynamic Mode Decomposition)를 이용해 고차원 관측함수 ψ(x)를 정의하고, 선형 쿠프만 연산자 A와 B를 최소제곱으로 학습한다. 이때 ψ는 상태 x를 포함하도록 설계돼 차원 nψ가 매우 크지만, 이후 단계에서 완전히 제거한다. 학습된 쿠프만 모델 ψk+1 = Aψk + Bu_k 로부터 다중‑스텝 예측식 X = Eψ(x(t)) + F U 를 도출한다. 여기서 E와 F는 각각 상태와 입력에 대한 선형 매핑이며, 차원은 N·nx와 N·nu 로 제한된다. 기존 쿠프만‑MPC는 이 예측식을 제약식에 직접 삽입해 일반 QP를 만든다. 저자는 이를 “동적 완화” 방식으로 바꾸어, 예측식 위반을 목적함수에 ℓ2 패널티 ρ·‖X−Eψ−F U‖² 로 포함한다. 이렇게 하면 제약조건은 단순히 박스(−1≤z≤1)만 남고, 목적함수는 양정 행렬 H와 선형항 h(x(t)) 로 구성된 표준 형태의 BoxQP가 된다. 이 구조적 변환은 (i) 상태·입력 변수를 모두 의사결정변수에 포함해 변수 수를 N·(nx+nu) 로 유지하면서도 (ii) 고차원 관측변수는 완전히 사라져 메모리와 연산량을 크게 절감한다는 장점이 있다.
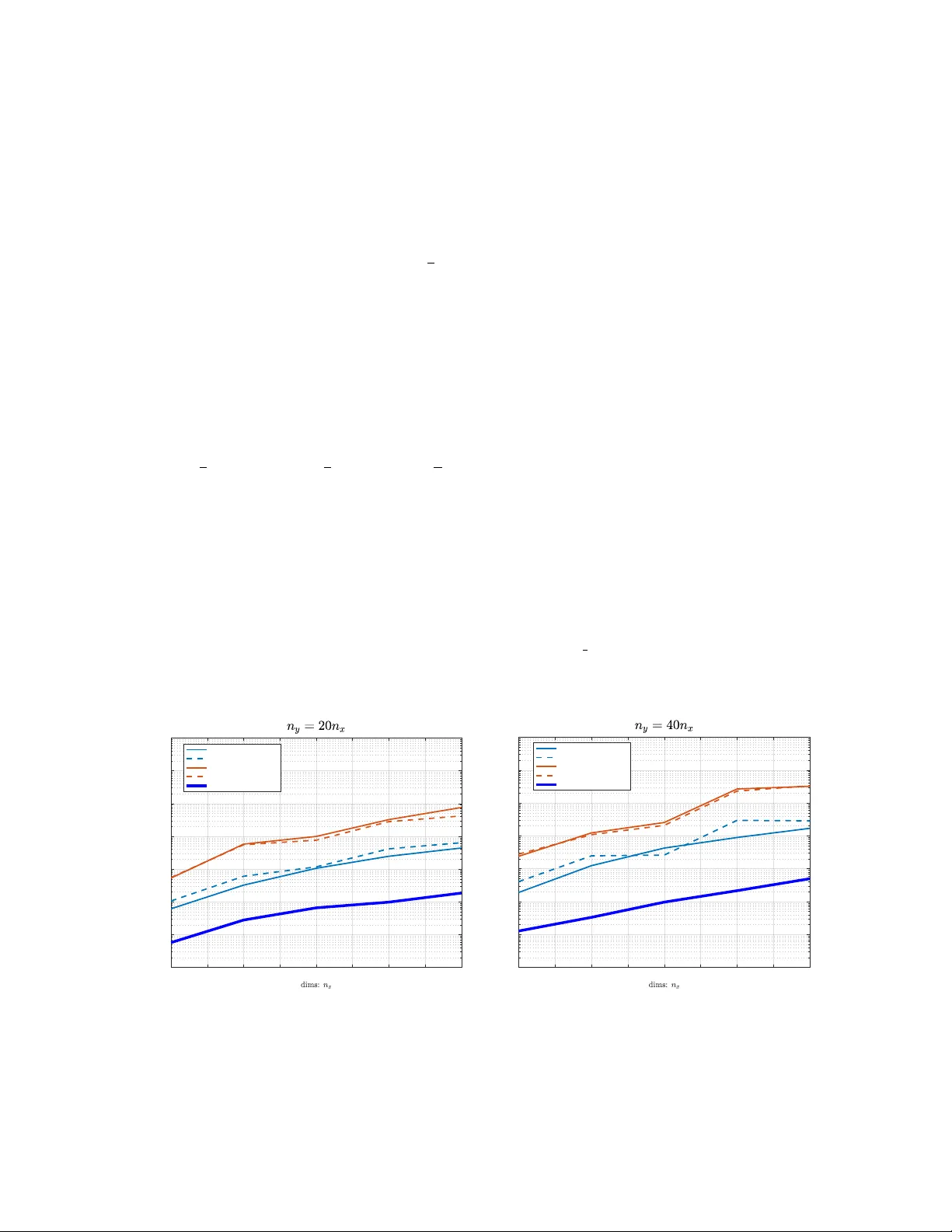
다음으로, 저자는 Feasible Mehrotra Predictor‑Corrector 내부점법을 BoxQP에 특화시켰다. 핵심은 (a) 초기점과 워밍스타트를 비용 없이 엄격히 feasible하게 구성하는 방법(식 12, 13)이며, (b) KKT 시스템에서 구조적 스파스성을 이용해 매 iteration마다 풀어야 할 선형 시스템의 차원을 nu·N 으로 축소하는 것이다. 특히 nx≫nu인 PDE 제어 문제에서 이 차원 축소는 5배 이상의 속도 향상을 만든다. 실험에서는 1040개의 변수와 2080개의 박스 제약을 가진 대규모 NMPC를 1 kHz(1 ms) 이하의 평균 해결 시간으로 수행했으며, warm‑start을 적용하면 평균 6회 이하의 이터레이션으로 수렴한다. 또한, ρ를 크게 잡아도 수치적 안정성을 유지하도록 로그‑바리어 항과 스케일링을 적절히 적용했다. 논문은 또한 Lipschitz 연속성을 정리(정리 2)하여, 최적 정책 u₀(x) 가 입력 변화에 대해 선형 상수 L≤ρ·√λmax(Eᵀ(FFᵀ+I)E)·Lψ/λmin(H) 로 제한됨을 증명한다. 이는 실시간 제어에서 급격한 제어 신호 변동을 방지하고, 모델링 오차에 대한 강인성을 이론적으로 뒷받침한다.
전체적으로 이 연구는 (1) 고차원 쿠프만 모델을 효율적으로 활용하는 새로운 NMPC 변환 기법, (2) 구조‑특화 IPM 설계, (3) 실시간 적용 가능성을 입증한 실험 결과라는 세 축으로 기여한다. 특히, 기존 일반 QP 솔버가 구조를 무시해 1000+ 변수 문제에서 kHz 수준을 달성하지 못하던 한계를, 구조‑익스플로잇과 warm‑start을 결합한 내부점법으로 극복한 점이 가장 혁신적이다. 이 프레임워크는 고차원 PDE 제어, 로봇 관절 제어, 전력 시스템 등 대규모 비선형 시스템에 실시간 적용이 가능한 새로운 도구로 활용될 전망이다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기