이중 BD RIS 기반 다중사용자 MIMO 채널 추정 효율화
본 논문은 두 개의 비대각 RIS(BD‑RIS)를 이용한 다중사용자 MIMO 시스템에서, 고차원 캐스케이드 채널을 다섯 개의 저차원 행렬로 압축할 수 있음을 보이고, 이를 기반으로 무노이즈 상황에서 완전 복원을 위한 최소 훈련 오버헤드를 유도한다. 또한 실제 잡음이 존재하는 경우에도 단계별 추정 알고리즘을 설계하고, 시뮬레이션을 통해 기존 대각 RIS 및 단일 BD‑RIS 대비 동일한 차수의 훈련 오버헤드로 높은 추정 정확도를 달성함을 입증한다…
저자: Junyuan Gao, Shuowen Zhang, Liang Liu
본 논문은 두 개의 비대각형 재구성 가능한 지능형 표면(BD‑RIS)이 동시에 존재하는 다중사용자 MIMO 시스템에서 채널 추정 문제를 다루며, 기존 연구가 주로 단일 RIS 혹은 대각형 RIS에 국한된 것과 달리, 복합적인 단일·이중 반사 경로와 RIS 간 상호 연결을 고려한다. 시스템 모델은 K명의 단일 안테나 사용자, L개의 안테나를 가진 BS, 그리고 각각 M₁, M₂개의 수동 반사 요소를 가진 두 개의 완전 연결형 BD‑RIS(Φ₁, Φ₂)로 구성된다. 각 RIS는 회로 제약으로 인해 스캐터링 매트릭스가 유니터리(ΦᵢᴴΦᵢ=I)이며, 사용자‑RIS, RIS‑RIS, RIS‑BS 채널은 각각 rᵢ,k, B, Gᵢ 로 표기한다. 직접 사용자‑BS 링크는 차단된 것으로 가정한다.
채널 모델링 단계에서, 단일 반사 링크(사용자‑RISᵢ‑BS)의 캐스케이드 채널은 hᵢ,k,t = Gᵢ Φᵢ,t rᵢ,k 로 표현되며, 이를 행렬 형태 Jᵢ,k = rᵢ,kᵀ⊗Gᵢ 로 재구성한다. 이때 Jᵢ,k는 Mᵢ개의 블록 Qᵢ,k,mᵢ 로 구성되며, Qᵢ,k,mᵢ = rᵢ,k,mᵢ·Gᵢ 로 정의된다. 이중 반사 링크(사용자‑RIS₁‑RIS₂‑BS)의 캐스케이드 채널은 h₁,₂,k,t = G₂ Φ₂,t B Φ₁,t r₁,k 로 나타내고, 이를 J₁,₂,k = vecᵀ(B)⊗r₁,kᵀ⊗G₂ 로 정리한다. 이러한 표현을 통해 전체 고차원 캐스케이드 채널은 다섯 개의 저차원 행렬(두 개의 Jᵢ,k, 하나의 J₁,₂,k, 그리고 Φ₁, Φ₂)으로 완전히 기술될 수 있음을 보인다.
핵심 이론적 기여는 “채널 상관성”이다. 동일 RIS 내부의 서로 다른 요소에 대한 사용자‑RIS 채널은 스케일링 관계에 있으며, 단일 반사 링크와 이중 반사 링크 모두 동일한 전파 환경을 공유한다는 점을 이용한다. 따라서, 임의 사용자‑RIS‑BS 경로는 기준 경로에 대한 스케일링 팩터만 다를 뿐이며, 이는 행렬 연산으로 쉽게 추출 가능하다. 이러한 특성을 활용하면, 전체 파라미터 수는 O(M₁+M₂+K·M₁+K·M₂) 수준으로 크게 감소한다.
무노이즈 상황에서는 단계별 파일럿 설계와 LS 추정 절차를 제시한다. 전체 추정 과정은 다음과 같이 5단계로 구성된다.
1) RIS₁을 특정 패턴(예: 단위 행렬)으로 고정하고, RIS₂를 OFF 상태로 두어 J₁을 추정한다.
2) RIS₂를 동일하게 고정하고 RIS₁을 OFF 상태로 두어 J₂를 추정한다.
3) 두 RIS를 모두 ON 상태로 두고, 서로 다른 시간 슬롯에서 사용자 파일럿을 전송해 J₁,₂를 추정한다.
4) 추정된 Jᵢ와 J₁,₂를 이용해 Φ₁, Φ₂의 유니터리 제약을 만족하도록 최소제곱 문제를 풀어 스캐터링 매트릭스를 복원한다.
5) 복원된 Φᵢ를 검증하고, 필요시 반복하여 정확도를 높인다.
논문은 위 과정을 통해 필요한 파일럿 심볼 수를
τ = 4(M₁+M₂) + 2ℓ K M₂ q₂ m + 2ℓ M₁ M₂ q₂ m + ℓ K M₁ f m
으로 정량화한다. 여기서 q₂는 RIS₂‑BS 채널의 랭크, f는 RIS₁‑BS와 RIS₁‑RIS₂‑BS 복합 채널의 랭크, ℓ은 각 단계에서 사용되는 파일럿 길이(시간 슬롯)이다. 이 식은 기존 단일 대각 RIS 혹은 단일 BD‑RIS와 동일 차수(O(M₁+M₂+K·M₁+K·M₂))의 오버헤드임을 보여, 다중 BD‑RIS가 제공하는 협동 빔포밍 이득을 채널 추정 비용 증가 없이 활용할 수 있음을 증명한다.
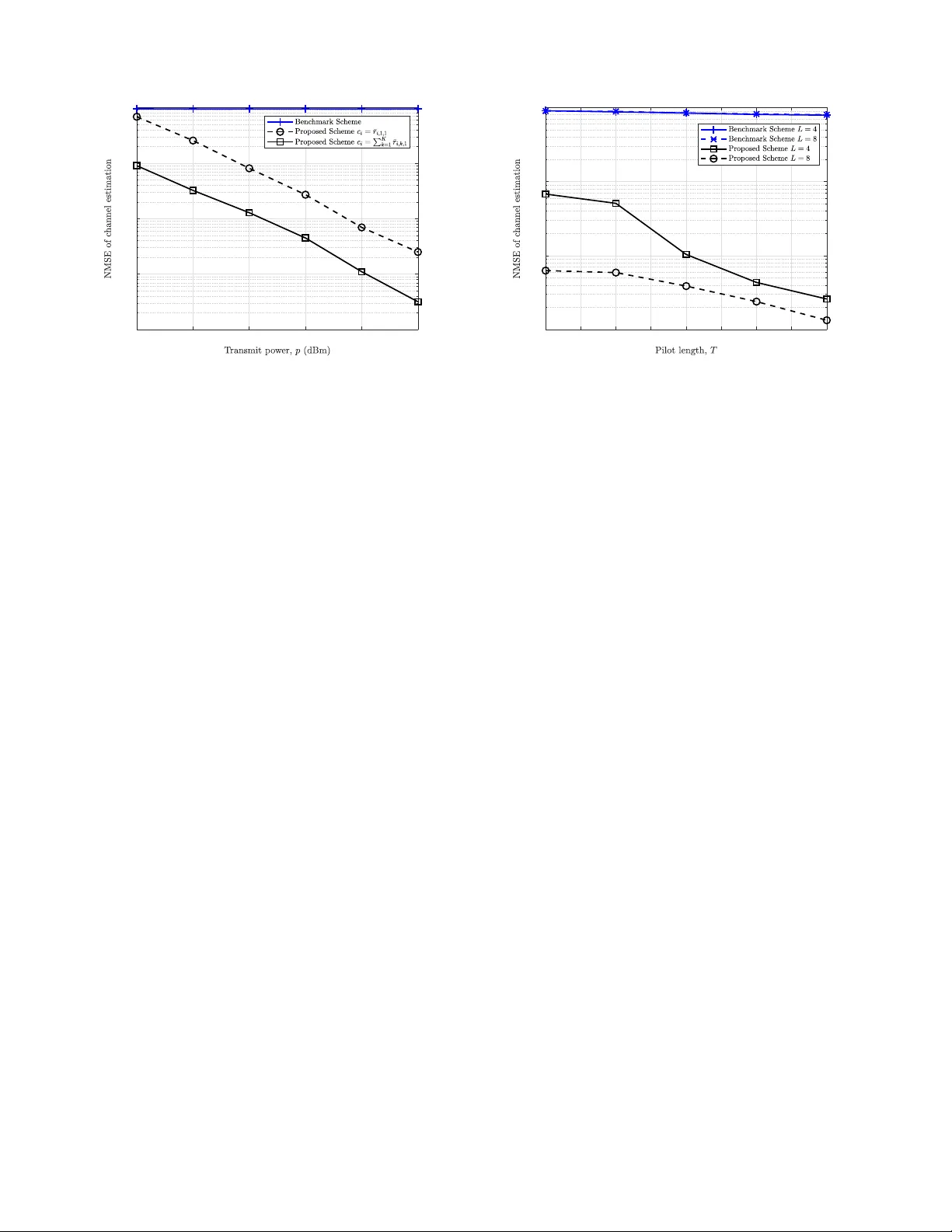
실제 잡음이 존재하는 경우, 저차원 행렬 추정이 불완전해질 수 있기에, 논문은 사전 지식이 없는 상황에서도 적용 가능한 잡음-강인 추정 프레임워크를 제시한다. 구체적으로, 각 단계에서 LS 추정 대신 최소 평균제곱오차(MMSE) 추정을 적용하고, 추정된 행렬을 이용해 다음 단계의 파일럿 패턴을 최적화한다. 이 반복적 알고리즘은 수렴 속도가 빠르고, 시뮬레이션 결과는 제안 방법이 기존 “모든 캐스케이드 항을 독립적으로 추정”하는 벤치마크 대비 평균 제곱오차(MSE)에서 5~10 dB 향상됨을 보여준다. 또한, 기존 연구에서 K−1 사용자를 침묵시켜야 하는 제약을 없애고, 모든 사용자가 동시에 파일럿을 전송할 수 있게 함으로써 시간 효율성도 크게 개선한다.
시뮬레이션 설정은 M₁=64, M₂=64, K=8, L=16 등 현실적인 6G 시나리오를 가정하고, 채널은 복소 가우시안 분포와 저차원 랭크 구조를 갖는다. 결과는 (1) 제안 방법이 훈련 오버헤드가 동일하거나 더 적음에도 불구하고 추정 정확도가 높음, (2) 채널 랭크가 낮을수록(즉, 강한 상관성이 존재할수록) 오버헤드 감소 효과가 더욱 두드러짐을 확인한다.
결론적으로, 이 논문은 (i) 다중 BD‑RIS 시스템에서 고차원 캐스케이드 채널을 저차원 행렬 집합으로 압축하는 이론적 기반을 제공하고, (ii) 무노이즈와 유노이즈 상황 모두에 적용 가능한 단계별 채널 추정 알고리즘을 설계했으며, (iii) 동일 차수의 훈련 오버헤드로 기존 대각 RIS 및 단일 BD‑RIS 대비 협동 빔포밍 이득을 실현할 수 있음을 실험적으로 입증한다. 이러한 결과는 차세대 6G 네트워크에서 다중 RIS 기반 스마트 라디오 환경을 구현하는 데 중요한 설계 지침을 제공한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기