핸드헬드 기기용 가상 Aperture 기반 거리 측정과 전력 제어 통합 기술
초록
본 논문은 손에 들고 사용하는 무선 기기가 사용자의 신체와의 거리를 정밀하게 측정하여, 규제된 최대 허용 노출(MPE) 한도 내에서 전송 전력을 단계적으로 조절할 수 있는 통합 센싱·통신(ISAC) 방식을 제안한다. uplink 파형을 활용하고, 사용자의 자연스러운 손 움직임이 만들어내는 가상 Aperture를 이용해 각도 해상도를 확보한다. 관성 센서만으로는 궤적 추정 정확도가 부족하므로, 강한 산란체의 위상 정보를 이용한 확장 칼만 필터 기반 자동 초점(autofocus) 알고리즘을 설계하고, 상관된 관성 오차를 고려한 베이지안 Cramér‑Rao Bound를 도출한다. 28 GHz 시뮬레이션 결과, 현실적인 센서 파라미터 하에서 센티미터 수준의 거리 정확도를 달성한다.
상세 분석
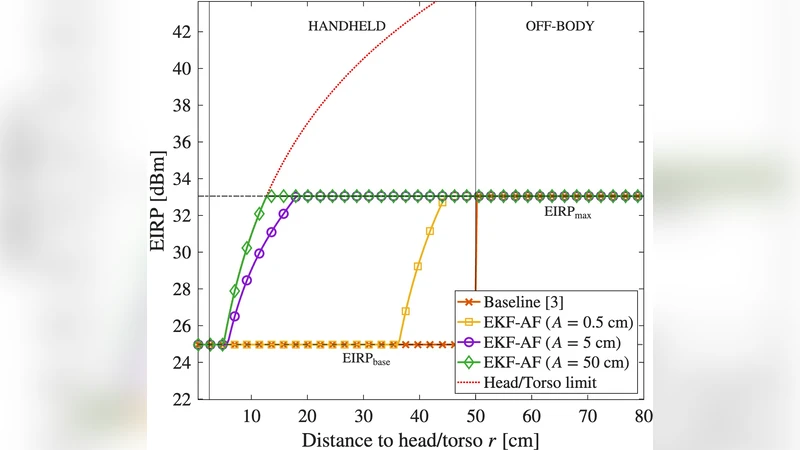
이 연구는 기존의 이진형 근접 센서가 제공하는 ‘가까움/멀리움’ 구분을 넘어, 실제 거리 값을 연속적으로 추정함으로써 전송 전력을 정밀하게 스케일링할 수 있는 새로운 패러다임을 제시한다. 핵심 아이디어는 통신용 uplink 파형 자체를 라이다와 같은 레이더 신호로 재활용하는 ISAC(Integrated Sensing and Communication) 구조이며, 여기서 중요한 점은 사용자가 손을 자연스럽게 움직이는 동안 발생하는 미세한 위치 변화가 가상의 큰 안테나 구역(virtual aperture)을 형성한다는 것이다. 가상 Aperture는 실제 물리적 배열이 필요 없으며, 시간에 따라 누적된 샘플들을 합성함으로써 각도 해상도를 향상시킨다. 그러나 이 가상 Aperture를 효과적으로 활용하려면 디바이스의 궤적(trajectory)을 정확히 알아야 하는데, 일반적인 스마트폰 내장 IMU(가속도계·자이로스코프)만으로는 누적 오차가 급격히 커져 실용적인 수준의 정밀도를 제공하지 못한다.
이를 해결하기 위해 논문은 두 단계의 보정 메커니즘을 도입한다. 첫 번째는 IMU 데이터를 기반으로 한 비선형 상태 추정 모델을 구성하고, 확장 칼만 필터(EKF)를 적용해 초기 궤적을 추정한다. 두 번째는 통신 채널에서 강하게 반사되는 스캐터러(예: 사용자의 손목, 금속 부품 등)의 위상 정보를 관측값으로 활용한다. 이러한 위상 관측은 실제 거리와 각도에 대한 직접적인 피드백을 제공하므로, EKF의 예측 단계에서 발생하는 잔여 오차를 자동 초점(autofocus) 방식으로 보정한다. 특히, 관성 센서 오차가 시간에 따라 상관관계를 갖는 경우를 모델링하여 베이지안 Cramér‑Rao Bound(BCRB)를 유도함으로써 이론적인 성능 한계를 명확히 제시한다.
시뮬레이션은 28 GHz mmWave 대역을 가정하고, 실제 스마트폰 수준의 IMU 노이즈(표준편차 0.1 m/s², 0.01 rad/s)와 10 dB SNR 이하의 통신 채널을 적용하였다. 결과는 가상 Aperture와 자동 초점 EKF를 결합했을 때 평균 거리 오차가 1~2 cm 수준으로 수렴함을 보여준다. 이는 기존 이진 근접 센서가 초과하는 전력 백오프를 최소화하고, 동시에 규제 준수를 보장하는 실용적인 솔루션으로 평가될 수 있다.
이 논문의 주요 기여는 (1) 손 움직임을 이용한 가상 Aperture 개념을 ISAC에 적용한 점, (2) 관성 센서와 통신 위상 관측을 융합한 EKF 기반 자동 초점 알고리즘을 설계한 점, (3) 상관된 관성 오차를 포함한 BCRB를 도출해 이론적 한계를 제시한 점이다. 향후 연구는 다중 사용자 환경에서의 상호 간섭, 실시간 구현을 위한 저전력 DSP 설계, 그리고 다른 주파수 대역(예: sub‑6 GHz)에서의 일반화 가능성을 탐색할 여지를 남긴다.
댓글 및 학술 토론
Loading comments...
의견 남기기