혼돈 진동기의 위상 기술 확장
초록
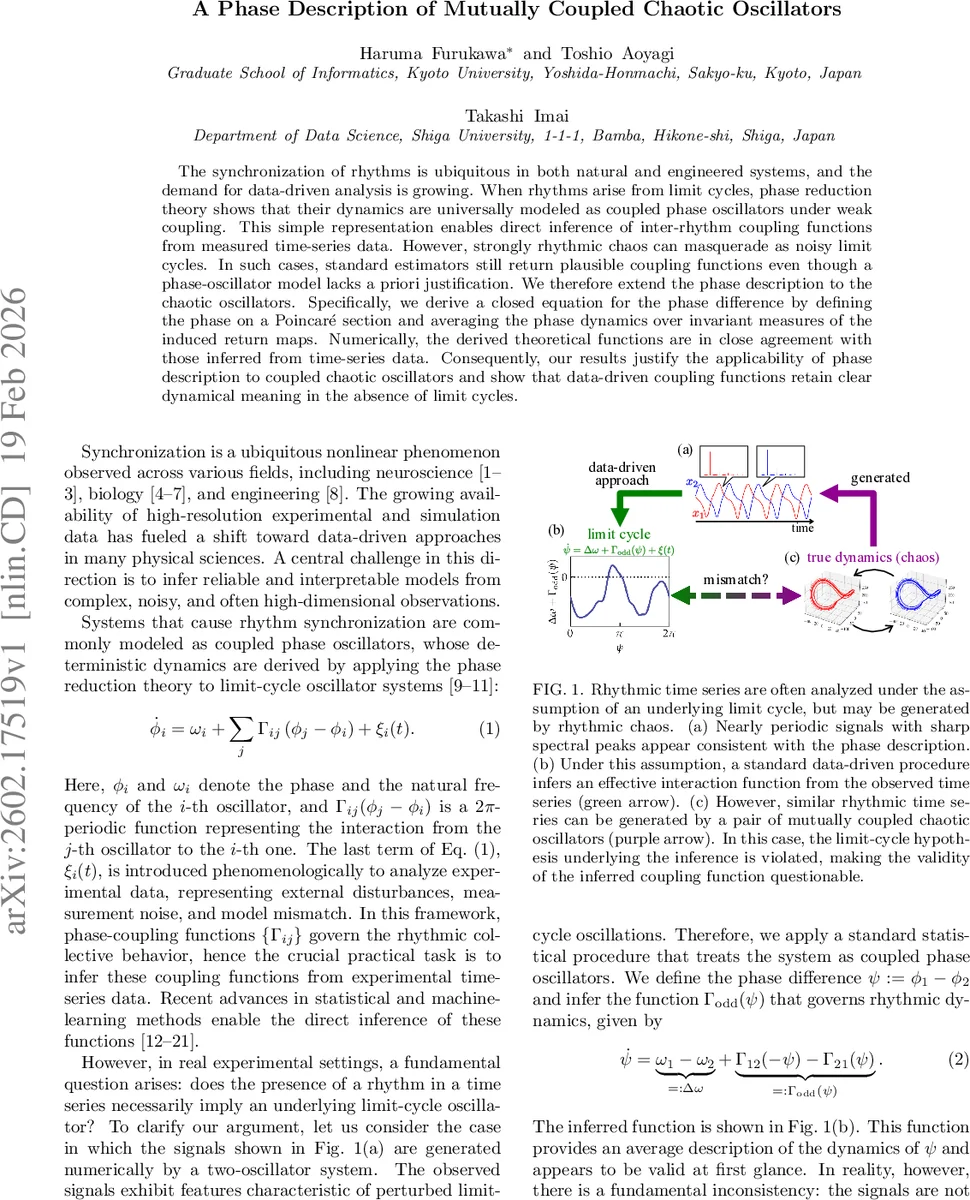
본 논문은 약하게 결합된 혼돈 오실레이터 쌍에 대해 위상 차이 방정식을 유도하고, 이를 데이터 기반 추정과 비교함으로써 전통적인 제한주기 위상 축소가 적용되지 않는 경우에도 위상 기술이 유효함을 보인다. Poincaré 단면과 불변 측도 평균을 이용해 이론적 상호작용 함수를 도출하고, Lorenz, Rössler‑Sprott‑N 등 다양한 혼돈 시스템에서 실험적으로 검증하였다.
상세 분석
이 연구는 기존 위상 감소 이론이 제한주기(리미트 사이클) 시스템에만 적용된다는 한계를 인식하고, 강하게 리듬을 보이는 혼돈 오실레이터에도 위상 개념을 확장하려는 시도이다. 핵심 아이디어는 각 오실레이터에 대해 전통적인 등위면(isochron)이 존재하지 않으므로, 대신 반환 시간을 거의 일정하게 유지하는 Poincaré 단면 (S_a) 을 정의하고, 이 단면을 유한 개의 셀로 분할한다. 각 셀 중심에 선형적으로 성장하는 위상을 할당하고, 셀 내부에서는 보간을 통해 연속적인 위상을 구성한다. 이렇게 정의된 위상 (\varphi_a(t;i))는 셀 인덱스 (i) 에 따라 고유 주파수 (\omega_a(i)=2\pi/T_a(i))를 갖는다.
진동기의 나머지 자유도는 ‘진폭’ (R_a) 으로 묶이며, 약한 결합 (\varepsilon) 하에서 진폭의 변동을 선형화하여 전이 행렬 (\Phi_{a,n}(t))와 보강항 (H_{a,n})을 도출한다. 여기서 중요한 점은 반환 시간의 변동을 무시하고 위상 차이 (\psi) 를 고정된 상수로 가정함으로써, 복잡한 연속‑시간 동역학을 이산‑시간 반환 맵으로 축소한다는 것이다. 두 오실레이터의 진폭 맵 (f_a) 을 구성하고, 각각 ((r_1(n),r_2(n))\to(r_1(n+1),r_2(n+1))) 와 ((r_1(n+1),r_2(n))\to(r_1(n+2),r_2(n+1))) 에 대해 불변 측도 (\mu)와 (\nu)를 정의한다. 이 두 측도는 혼돈 시스템의 비정상적인 확률분포를 포착하며, 위상 방정식에 평균을 취할 때 각각 다른 기여를 제공한다.
평균화 과정을 거치면 최종적인 위상 차이 방정식은
\
댓글 및 학술 토론
Loading comments...
의견 남기기