손상 고정익 UAV를 위한 강인 적응형 슬라이딩 모드 제어
본 논문은 구조적 손상이나 제어면 효율 저하가 발생한 고정익 무인항공기의 비행 안정성을 확보하기 위해, 공기역학 계수 변동과 부분적인 제어면 손실을 고려한 손상 인식 비행역학 모델을 구축하고, 이 모델에 기반한 강인 적응형 슬라이딩 모드 컨트롤러(RASMC)를 설계한다. Lyapunov 기반 안정성 증명을 통해 제어 이득의 자동 적응 법칙을 도출하고, 정상 상태에서는 낮은 제어 노력, 손상 상황에서는 이득을 증대시켜 추적 오차를 제한한다. 시뮬…
저자: Mark Spiller, Lennart Kracke, Johannes Autenrieb
본 논문은 구조적 손상이나 제어면 효율 저하가 발생한 고정익 무인항공기(UAV)의 비행 안정성을 확보하기 위해, 강인 적응형 슬라이딩 모드 컨트롤러(Robust Adaptive Sliding-Mode Controller, RASMC)를 설계하고 검증한다. 연구는 크게 네 부분으로 구성된다.
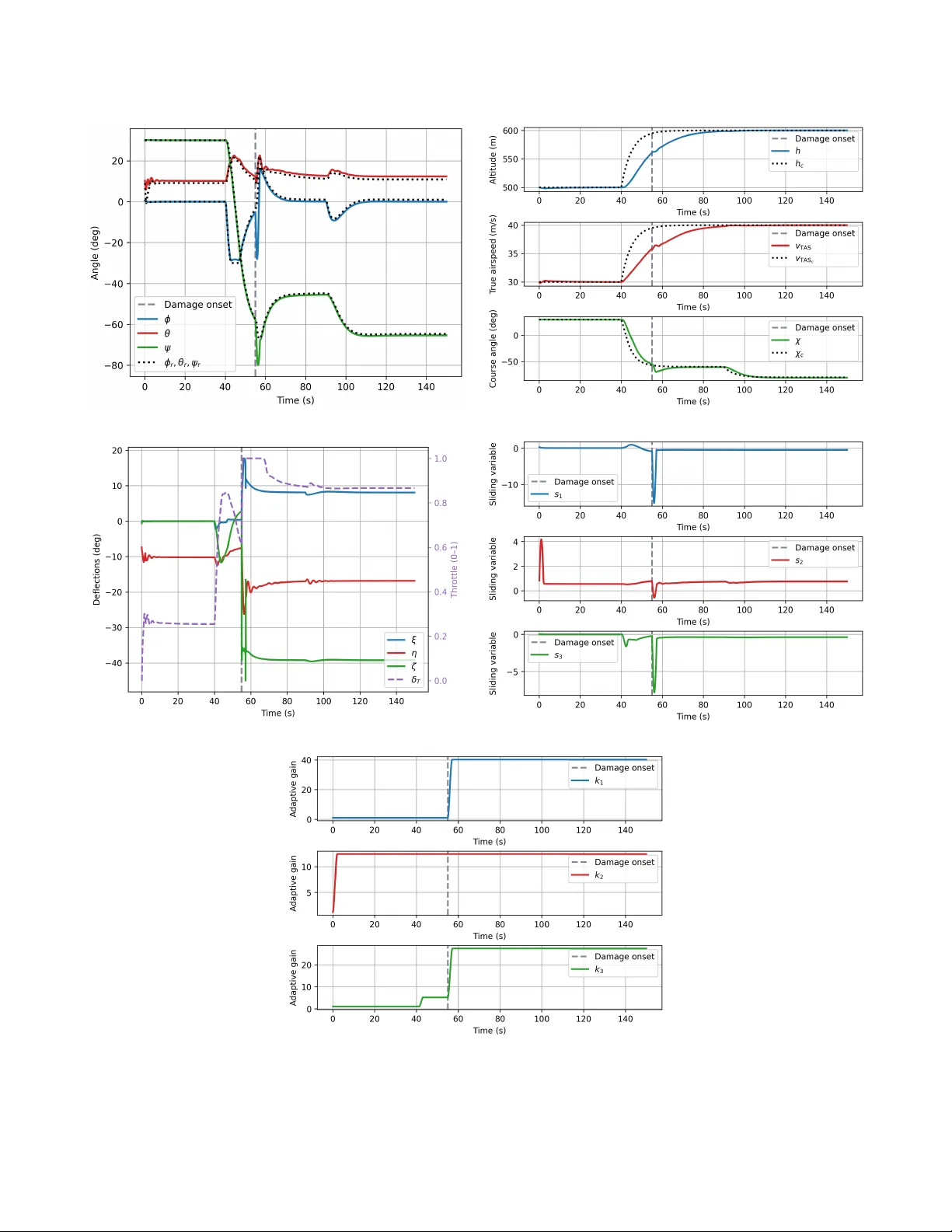
첫 번째는 손상 인식 비행역학 모델의 개발이다. 저자들은 기존 6자유도 비행 방정식에 손상 파라미터를 도입한다. 구체적으로, 날개 손상은 양력·항력 계수 C_L, C_D 를 손상 비율 α∈
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기