핀칭 안테나 시스템 고장 탐지를 위한 태그 파일럿 기반 신호 처리 기법
초록
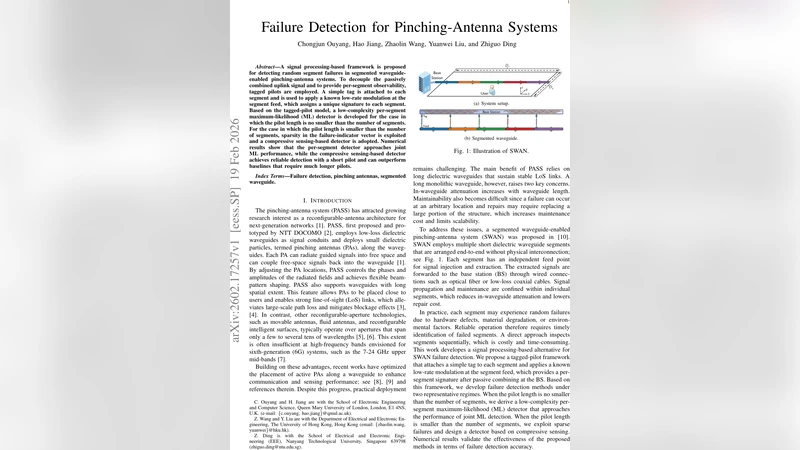
본 논문은 세그먼트형 파형가이드 기반 핀칭 안테나 시스템(SWAN)의 각 구간 고장을 실시간으로 탐지하기 위해, 구간마다 고유한 저속 변조 태그를 부여한 파일럿 신호를 이용하는 프레임워크를 제안한다. 파일럿 길이가 구간 수와 같거나 클 경우 저복잡도 최대우도(ML) 검출기를, 파일럿 길이가 구간 수보다 짧을 경우 희소성을 활용한 압축센싱 기반 검출기를 설계하여, 짧은 파일럿으로도 높은 탐지 정확도를 달성한다.
상세 분석
이 연구는 기존의 단일 RF 체인에 모든 세그먼트 신호가 수동적으로 결합되는 구조가 초래하는 측정 행렬의 랭크 결핍 문제를 근본적으로 해결한다는 점에서 의미가 크다. 저자들은 각 세그먼트 피드에 ±1 형태의 태그 시퀀스를 삽입함으로써, 파일럿 신호와 결합된 효과적인 측정 행렬을 diag(x)·B·diag(h) 형태로 만들었다. 여기서 B 는 T×M 차원의 태그 매트릭스로, T는 파일럿 길이, M은 세그먼트 수이다. 태그 매트릭스가 풀랭크를 갖게 되면, 원래의 스칼라 제약식 hᵀs = y/x 에서 벗어나 다차원 선형 시스템으로 변환되어, 각 세그먼트의 상태 sₘ∈{0,1} 을 복원할 수 있다.
오버디터미네이션(T ≥ M) 경우, B가 열전치와 곱해졌을 때 정규 행렬 BᴴB 가 가역성을 가지므로 최소제곱 해가 유일하게 정의된다. 저자들은 B의 열을 상호 직교(예: Walsh‑Hadamard 행렬)하도록 설계함으로써 BᴴB = T·Iₘ 을 만족시켰다. 이 경우 추정 오차 공분산 Cₑ = σ²/(P)·(BᴴB)⁻¹ = σ²/(P·T)·Iₘ 이 되어, 각 세그먼트 추정값이 독립적이며 동일한 분산을 갖는다. 따라서 복잡도가 O(M)인 per‑segment ML 판별식 Re{hₘ*·âₘ} ≷ |hₘ|²/2 을 적용하면, 전역 ML 탐지와 동일한 성능을 얻는다.
언더디터미네이션(T < M) 상황에서는 B가 풀랭크가 아니므로 직접적인 LS 복구가 불가능하다. 저자들은 고장 발생이 드물다는 가정 하에 f = s₀ − s (희소한 변화 벡터) 를 도입하고, 잔차 r = y + A_f s₀ = A_f f + n 을 기반으로 LASSO(ℓ₁ 정규화) 문제를 풀었다. 복소수 모델을 실수‑실수 형태로 변환한 뒤, λ 파라미터를 디스크리퍼시 규칙에 따라 선택하고, 최종적으로 τ 임계값을 이용해 fₘ∈{0,1} 을 이진 판별한다. 실험 결과, T가 M에 비해 매우 작아도(예: T = 64, M = 128) 높은 검출 정확도를 유지하며, 기존의 긴 파일럿을 요구하는 방법보다 효율적이다.
또한, 태그 매트릭스 설계에 있어 완전 직교가 불가능한 경우, 큰 Walsh‑Hadamard 행렬에서 임의 서브셋을 선택하거나 무작위 선택을 통해 컬럼 간 상관을 최소화한다. 이는 실제 구현 시 하드웨어 제약(예: PIN 다이오드 스위치, 0/π 위상 변조기)과도 잘 맞는다. 전체적으로, 이 논문은 신호 처리 관점에서 시스템 레벨 고장 진단을 가능하게 하는 혁신적인 프레임워크를 제시하며, 6G와 같은 초고주파 대역에서 대규모 파형가이드 기반 재구성 가능한 안테나의 실용성을 크게 높인다.
댓글 및 학술 토론
Loading comments...
의견 남기기