기지국 이동 정보가 목표 지향 원격 모니터링에 미치는 가치
본 논문은 에너지 수확 센서가 이동형 수신기(LEO 위성·UAV)와 통신하는 상황에서, 수신기의 이동으로 인한 시간 가변 채널을 마코프 모델로 표현하고, 이를 POMDP로 정식화한다. 믿음 상태 MDP로 변환 후 상대값 반복법으로 최적 샘플링·전송 정책을 도출한다. 최대우도(ML)와 최소 평균 왜곡(MMD) 두 추정 방식을 비교하며, 이동 정보와 채널 상태 정보를 활용한 정책이 기존 정적 채널 가정 대비 평균 왜곡을 10%~42% 감소시킴을 실…
저자: Sehani Siriwardana, Jean Michel de Souza Sant'Ana, Richard Demo Souza
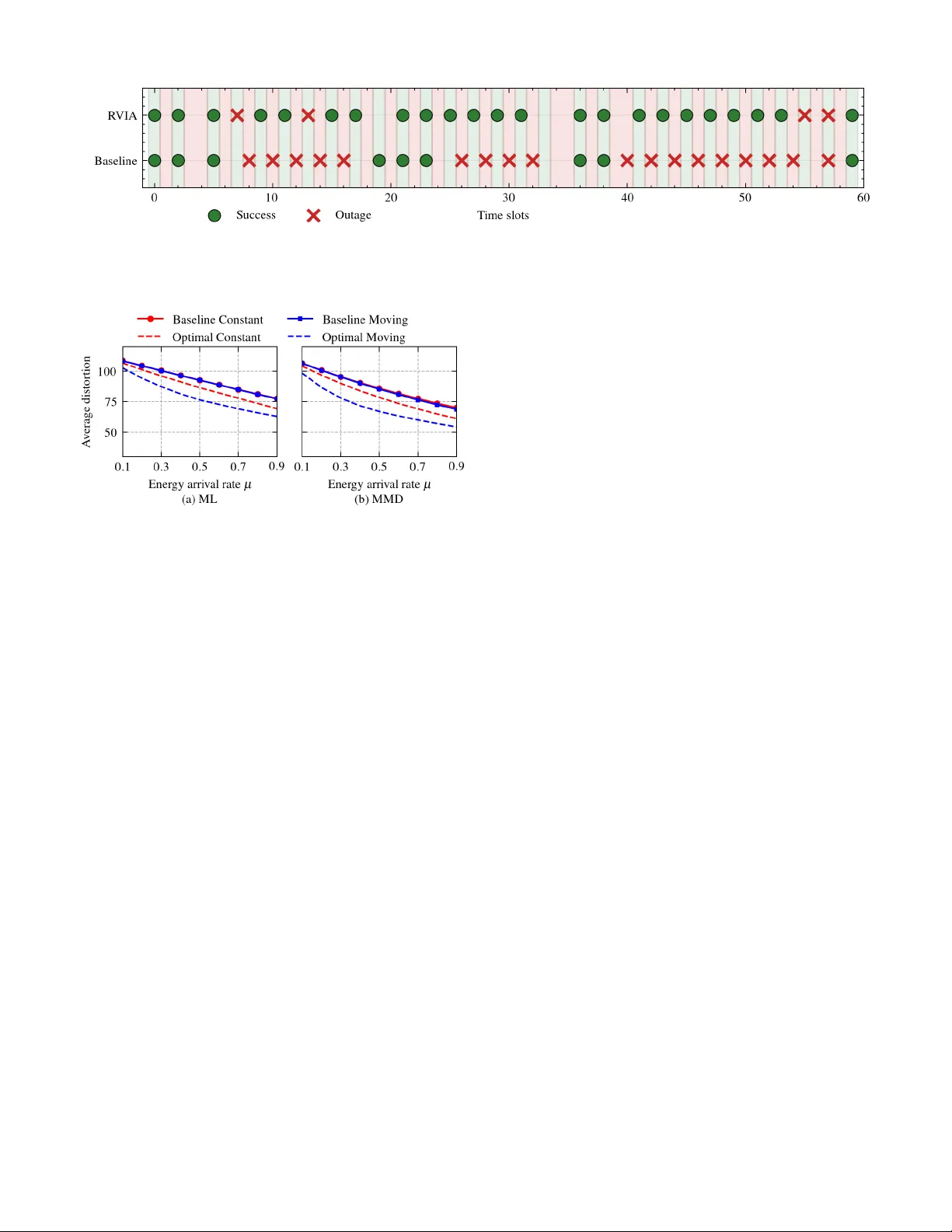
본 논문은 에너지 수확(EH) 센서가 이동형 수신기와 통신하면서 목표 지향 원격 모니터링을 수행하는 문제를 다룬다. 기존 연구들은 대부분 수신기가 고정된 위치에 있다고 가정하고, 채널을 시간에 따라 일정하거나 단순히 평균값으로 모델링한다. 그러나 저궤도 위성(LEO)이나 무인 항공기(UAV)와 같은 실제 시스템에서는 수신기의 이동으로 인해 채널 특성이 급격히 변한다. 이러한 동적 채널을 무시하면 전송 성공 확률을 과대평가하거나, 에너지 사용 효율을 저하시킬 수 있다.
**1) 시스템 모델**
- **마코프 소스**: 관측되지 않는 이산 상태 마코프 프로세스 X_t가 존재하며, 목표는 X_t의 실시간 추정이다.
- **에너지 수확 센서**: 매 슬롯마다 베르누이 확률 λ로 에너지 단위가 충전되며, 배터리는 최대 B_max 단위까지 저장 가능하다.
- **채널 모델**: 수신기의 이동에 따라 채널 상태 C_t ∈ {1,…,M}가 변하고, 이는 전이 행렬 P_C 로 정의된 유한 상태 마코프 체인(FSMC)이다. 각 채널 상태마다 전송 성공 확률 p_s(c) 가 다르다.
- **관측 구조**: 센서는 현재 배터리 상태 b_t와 이전 전송 결과(성공/실패)만을 관측한다. 채널 상태는 직접 관측되지 않으며, 전송 성공 여부를 통해 간접적으로 추정한다.
**2) 문제 정의**
목표는 평균 왜곡 D̄ = lim sup_{T→∞} (1/T) Σ_{t=1}^T E
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기