조건부 흐름 매칭으로 강체‑소프트 그리퍼 간 그립 변환
초록
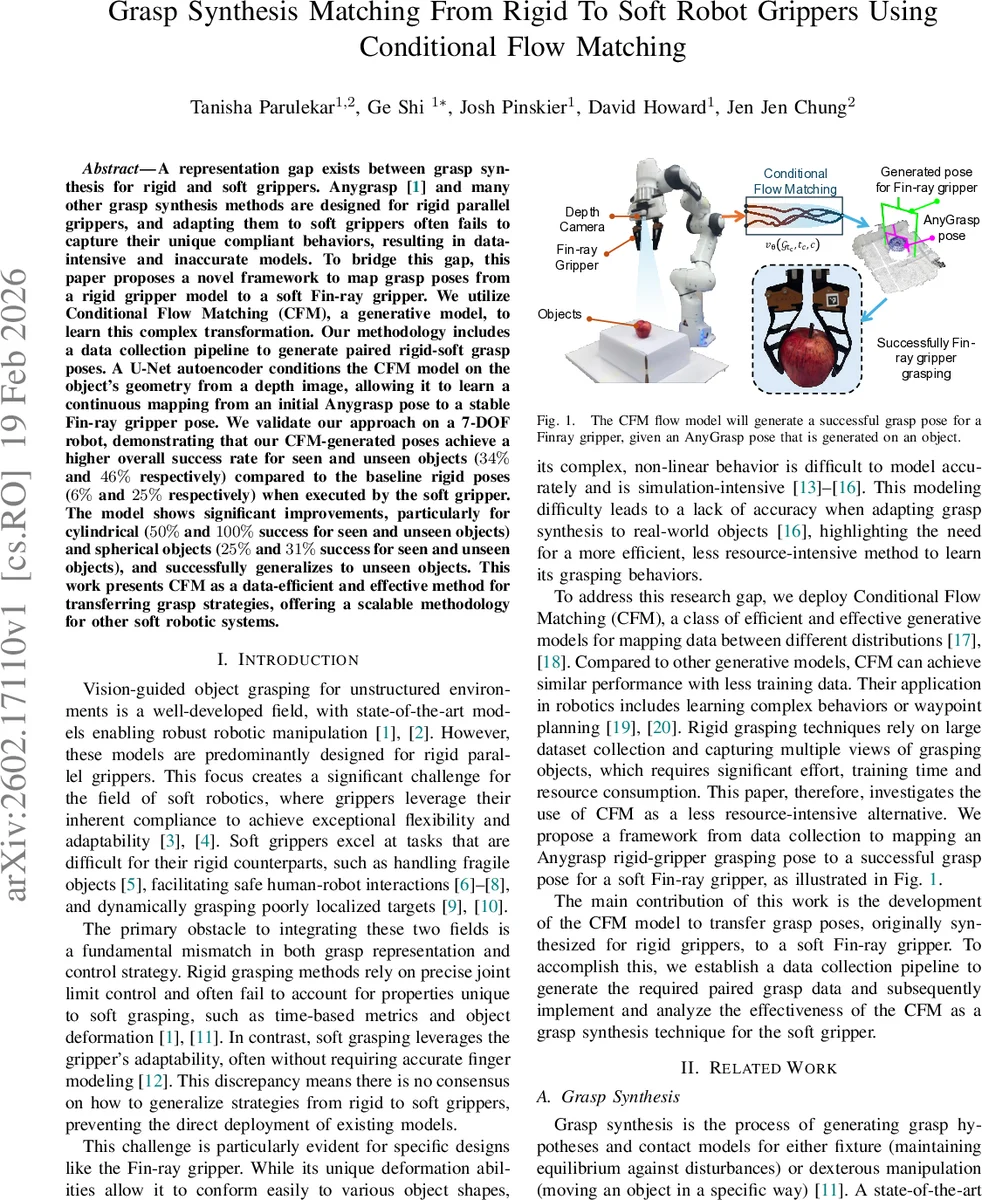
본 논문은 강체 병렬 그리퍼용 그립 생성기인 AnyGrasp의 출력 포즈를 소프트 Fin‑ray 그리퍼에 맞는 포즈로 변환하기 위해 Conditional Flow Matching(CFM) 모델을 제안한다. 깊이 이미지 기반 U‑Net 인코더로 객체 형상을 조건으로 활용하고, MLP 기반 벡터 필드를 학습해 연속적인 흐름 경로를 생성한다. 실험 결과 CFM이 생성한 소프트 그립 포즈는 기존 강체 포즈에 비해 성공률이 크게 향상되었으며, 특히 원통형 및 구형 물체에서 두드러진 성능을 보였다.
상세 분석
이 연구는 로봇 조작 분야에서 강체 그리퍼용으로 설계된 AnyGrasp와 같은 최신 그립 합성 모델이 소프트 그리퍼에 직접 적용될 경우 발생하는 ‘표현 격차’를 체계적으로 해결하고자 한다. 강체 그리퍼는 정확한 접촉점과 개구 폭을 전제로 하지만, Fin‑ray와 같은 소프트 그리퍼는 변형 가능성, 접촉 면적 확대, 시간‑기반 클로징 메커니즘 등 복합적인 물리적 특성을 갖는다. 따라서 단순히 AnyGrasp가 제시하는 7‑DOF(위치·방향·개구) 파라미터를 그대로 사용하면 소프트 그리퍼는 불안정하거나 전혀 잡지 못하는 경우가 빈번하다.
논문은 이러한 문제를 해결하기 위해 Conditional Flow Matching(CFM)이라는 연속형 확률 변환 모델을 도입한다. CFM은 두 데이터 분포(강체 그립 포즈와 소프트 그립 포즈) 사이의 매핑을 시간‑연속 ODE 형태의 흐름 경로로 학습한다. 구체적으로, 초기 상태 G_any (AnyGrasp 포즈)와 목표 상태 G_soft (수동으로 조정한 성공적인 Fin‑ray 포즈)를 연결하는 벡터 필드 v_θ 를 MLP로 파라미터화하고, 조건 벡터 c (깊이 이미지에서 추출된 객체 형상 특징)를 입력으로 받아 상황‑의존적인 흐름을 생성한다.
조건 벡터 c 는 128‑차원 잠재 표현을 갖는 U‑Net 오토인코더에 의해 얻어진다. 이 인코더는 865개의 다양한 물체 깊이 이미지로 사전 학습돼, 물체의 형태와 크기를 압축된 형태로 전달한다. 흐름 경로는 t∈
댓글 및 학술 토론
Loading comments...
의견 남기기