스펙트럼 힘 결합을 고려한 기하학적 제어 안정성 분석
안내: 본 포스트의 한글 요약 및 분석 리포트는 AI 기술을 통해 자동 생성되었습니다. 정보의 정확성을 위해 하단의 [원본 논문 뷰어] 또는 ArXiv 원문을 반드시 참조하시기 바랍니다.
초록
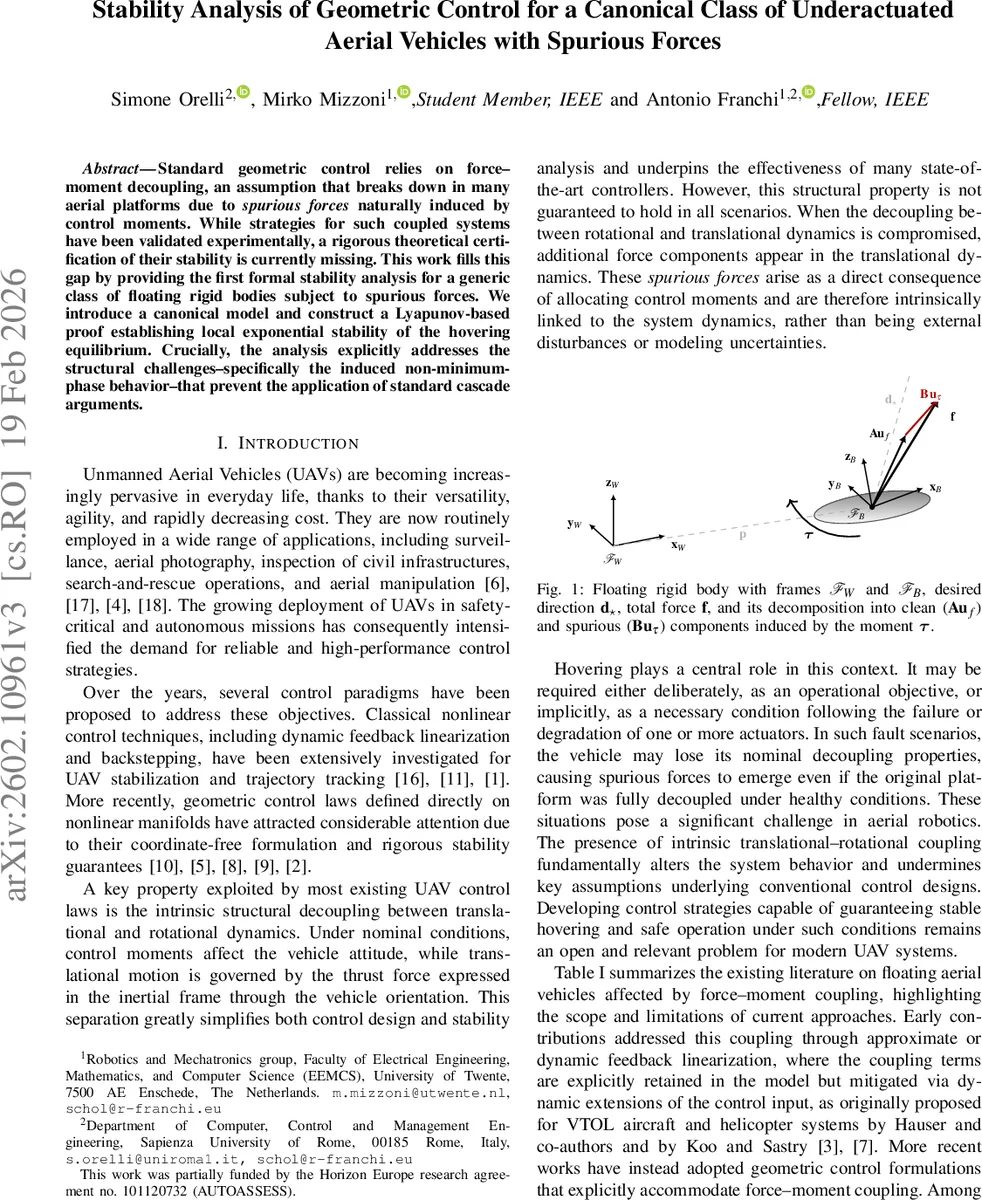
본 논문은 회전‑전달 결합(스퓨리어스 포스)이 존재하는 언액추에이티드 비행체를 위한 기하학적 제어법의 안정성을 최초로 정식 Lyapunov 방법으로 증명한다. 3차원 자유강체의 표준 모델에 순간적인 힘‑모멘트 할당 행렬을 도입하고, 위치·자세·워치 매핑 3단계 제어구조를 그대로 사용하면서도, 비최소위상(non‑minimum‑phase) 특성을 포함한 비선형 결합항을 새로운 바운드와 함께 처리한다. 결과적으로, 선호 방향(d⋆)을 갖는 최소 4입력(1개 힘·3개 모멘트) 플랫폼에 대해 호버링 평형점이 지역 지수안정성을 갖음이 증명된다.
상세 분석
이 연구는 기존 기하학적 제어가 전제하는 “힘‑모멘트 디커플링”이 깨지는 상황, 즉 제어 모멘트가 불가피하게 전역 힘 성분을 유발하는 스퓨리어스 포스(spurious force)를 포함하는 시스템을 대상으로 한다. 저자는 먼저 자유강체의 뉴턴‑오일러 방정식을 일반화하여, 힘 할당 행렬 A와 모멘트 할당 행렬 B, C를 도입하고, 특히 Bτ가 모멘트 입력에 의해 발생하는 비보상 가능한 힘을 나타낸다. 구조적 가정으로는 (i) 전 모멘트 권한(rank(C)=3)과 (ii) 최소 하나 이상의 힘 방향이 모멘트와 독립적으로 생성될 수 있는 조건(rank(A)≥1)을 둔다. 이때 플랫폼은 “부분 결합(Partially Coupled)‑단일 자유 방향(PC‑D1)”으로 분류되며, 이는 n_f=1, n_τ=3인 최소 4입력 시스템에 해당한다.
제어 설계는 기존
댓글 및 학술 토론
Loading comments...
의견 남기기