스테레오 깊이 착시와 시차의 갈등
초록
본 논문은 두 원이 서로 다른 거리에서 움직일 때, 관찰자들이 물리적 거리보다 망막 시차를 기준으로 깊이 일체감을 판단한다는 ‘Linton Stereo Illusion’ 을 제시한다. 실험 결과 대부분이 시차 일정 조건을 ‘강체’처럼 인식했으며, 이는 전통적인 삼각측량(깊이 상수성) 모델보다 시차‑전용 모델을 지지한다는 결론을 도출한다.
상세 분석
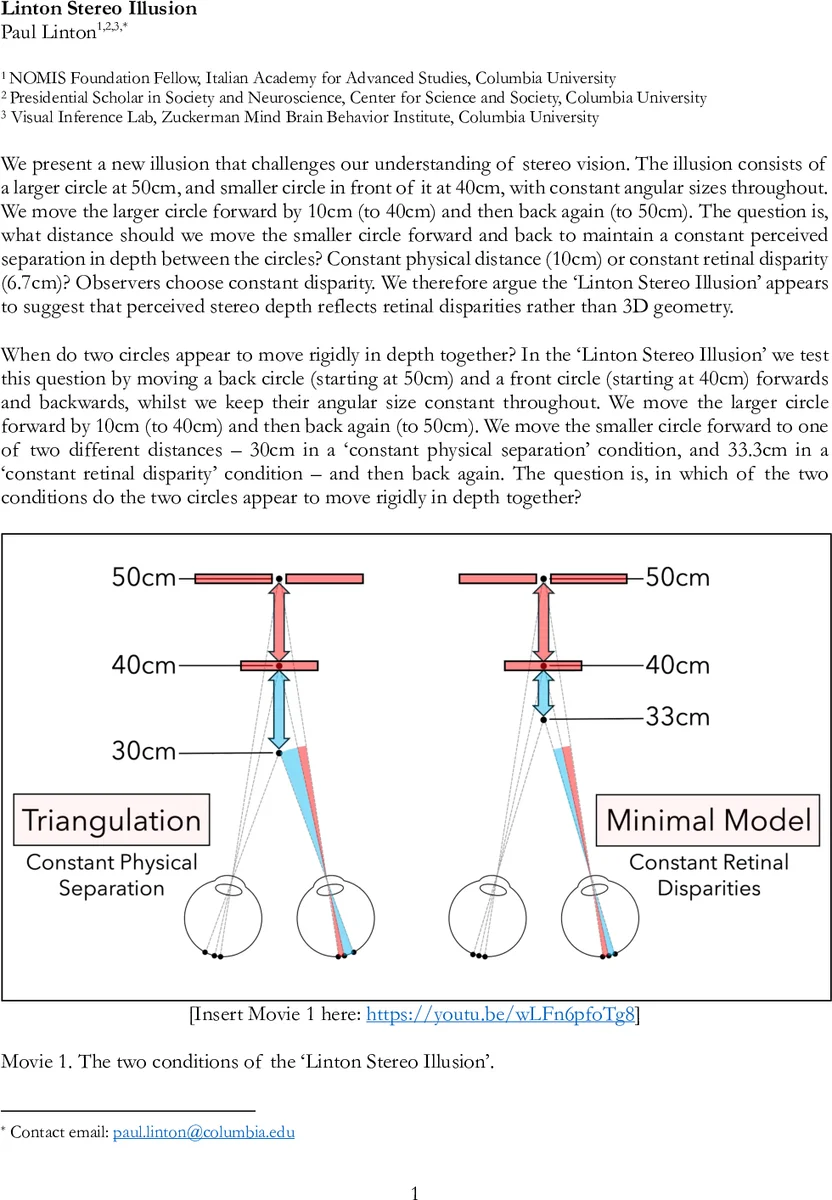
‘Linton Stereo Illusion’은 전면 원(40 cm)과 후면 원(50 cm)을 각각 일정한 각시각을 유지하면서 전·후진시키는 실험 설계이다. 후면 원을 10 cm 전진(40 cm)했다가 복귀시키는 동안 전면 원을 두 가지 방식으로 움직인다. 첫 번째는 물리적 거리 차이를 10 cm로 유지하는 ‘물리적 일정’ 조건(전면 원을 30 cm에 위치)이고, 두 번째는 두 원 사이의 망막 시차를 동일하게 유지하는 ‘시차 일정’ 조건(전면 원을 33.3 cm에 위치)이다. 관찰자 90 % 이상이 시차 일정 조건에서 두 원이 동일한 깊이로 움직인다고 보고했으며, 물리적 일정 조건에서는 전면 원이 과도하게 움직여 ‘콘서티나’ 효과가 나타났다.
이 결과는 전통적인 삼각측량 모델, 즉 시차를 실제 거리로 역산하여 3‑D 구조를 복원한다는 가정과 정반대이다. 삼각측량 모델은 물리적 거리 유지 시 두 물체가 강체처럼 보일 것이라 예측하지만, 실험에서는 그렇지 않았다. 반면, 저자(Linton, 2023)의 ‘Minimal Model’은 시차 자체가 깊이 지각의 직접적인 원천이라고 주장한다. 실험에서 시차를 일정하게 유지했을 때 깊이 일체감이 유지된다는 점은 이 모델을 강력히 뒷받침한다.
논문은 또한 두 가지 대안 설명을 검토한다. 첫 번째는 Johnston(1991)의 ‘깊이 상수성 실패’ 이론으로, 시차가 눈의 수렴각에 의해 부정확하게 스케일링된다고 본다. 저자는 Johnston 모델이 예측하는 압축·팽창 패턴이 현재 착시와 정반대임을 지적한다. 두 번째는 각시각(시각적 크기) 유지가 착시를 야기한다는 가능성이다. 그러나 각시각을 일정하게 유지했음에도 불구하고 시차 일정 조건에서만 강체 인식이 나타난 점은 이 설명만으로는 충분하지 않다.
저자는 실험적 변수를 확대할 필요성을 강조한다. IPD, 시점 거리, 움직임 속도 등을 조절한 다양한 버전의 데모(ThreeJS, Psychtoolbox)와 온라인 설문을 통해 모델 간 차별력을 높일 수 있다. 또한, 시차와 수렴각의 상호작용, 깊이 상수성의 부분적 적용 여부 등을 정량화하는 추가 실험이 제안된다.
결론적으로, ‘Linton Stereo Illusion’은 시차‑전용 모델이 인간 스테레오 깊이 지각을 설명하는 데 더 타당함을 실증적으로 보여준다. 이는 스테레오 비전 연구에서 ‘깊이 상수성’이라는 오래된 가정을 재검토하고, 시차 자체가 지각적 깊이의 기본 단위라는 새로운 패러다임을 제시한다.
댓글 및 학술 토론
Loading comments...
의견 남기기