저추력 큐브샛 달 궤도 최적화 HORYU VI 미션
** 본 논문은 12U CubeSat HORYU‑VI가 Artemis 프로그램의 SLS 2차 탑재체로 발사된 뒤, 저추력 전기추진을 이용해 달 궤도로 진입하고 100 km 고도 근접 원형 궤도를 확보하는 전 과정의 궤도 설계와 최적화를 제시한다. 초기 고에너지 지구‑달 비행을 3단계(비행 전 감속, 달 포획, 궤도 원형화)로 분할하고, 각 단계별 충동식 초기 해를 SQP 기반의 유한 연소 최적화(YUKON)로 정제한다. 지구·달·태양·목성 …
저자: Omer Burak Iskender, Keck Voon Ling, Mengu Cho
**
본 논문은 12U CubeSat HORYU‑VI가 NASA Artemis 프로그램의 SLS 2차 탑재체로 발사된 뒤, 저추력 전기추진(Hall‑effect thruster 4기, Isp = 1000 s, 총 추력 ≈ 1.2 mN, 효율 90 %)을 이용해 달 궤도에 진입하고 100 km 고도의 근접 원형 궤도를 확보하는 전 과정을 상세히 기술한다. 초기 궤도는 지구‑달 시스템을 통과하는 고에너지 비행(e = 0.9667)으로, 제어하지 않으면 4.2일 후 태양 주 궤도로 탈출한다. 이를 방지하기 위해 미션은 (1) 비행 전 감속, (2) 달 포획, (3) 궤도 원형화의 3단계로 나뉜다.
각 단계마다 먼저 충동식(impulsive) 해를 계산해 ΔV 하한과 연소 시점을 추정한다. 충동식 해는 전통적인 Lambert 해법이나 단일 연소 모델을 사용해 빠르게 얻을 수 있지만, 실제 저추력 연소에서는 연소 지속시간과 방향이 연속적으로 변해야 하므로 정밀한 최적화가 필요하다. 이를 위해 논문은 NASA GMAT에 내장된 YUKON(SQP 기반) 최적화기를 활용한다. YUKON은 연소 방향 3차원 벡터, 연소 지속시간, 코스트 구간 등 총 8개의 설계 변수를 동시에 최적화한다.
동역학 모델은 지구·달·태양·목성의 4체 중력과, 달 근접 시 1500차·1500차까지 포함한 고정밀 달 중력장(GGLP1500D)을 포함한다. 연소 구간에서는 추력 한계 ∥F_total∥ ≤ 1.2 mN(효율 90 % 적용)와 연료 질량 감소를 고려한다.
제약조건 설계는 세 단계에서 핵심 역할을 한다. 비행 전 감속 단계에서는 연료 소모를 최소화하면서 달 탈출 에너지를 낮추는 것이 목표이며, 달 포획 단계에서는 최소 고도 ≥ 6000 km와 C₃ ≤ ‑0.11 km²/s²(음수는 구속 궤도)를 동시에 만족해야 한다. 초기에는 이심률(e)만 제한했으나, e ≤ 0.6에서는 여전히 탈출이 발생하고, e ≤ 0.7에서는 고도가 달 표면 이하로 떨어지는 충돌 위험이 있었다. 따라서 최종적으로 C₃‑RMA G 복합 제약을 채택해 포획 성공률을 100 %로 끌어올렸다.
비행 전 감속은 약 2일 동안 레트로그레이드 연소로 수행되며, 총 ΔV는 약 100 m/s 수준이다. 달 포획 단계는 약 77.5일간의 코스트 후, 지구‑VNB 기준으로 약 10일간의 연소와 33일간의 코스트, 그리고 달‑VNB 기준으로 약 10일간의 연소를 포함한다. 이때 연소 방향은 달 상대 속도와 정렬해 최대 감속 효율을 얻는다.
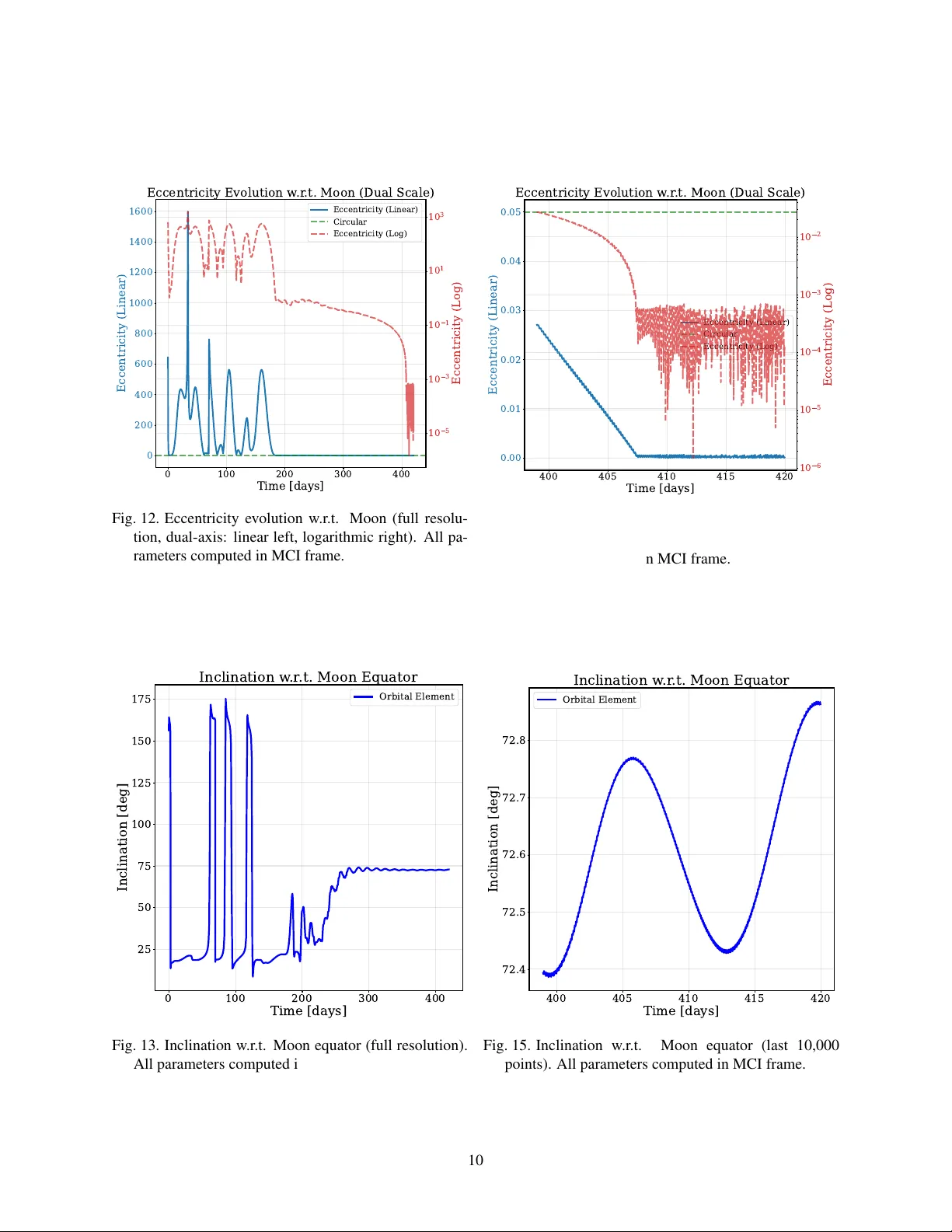
궤도 원형화 단계는 400번에 달하는 연소‑코스트 사이클을 통해 진행된다. 각 사이클은 근지점(ν = 240°→130°)에서 레트로그레이드 연소를 하고, 이후 130°→240° 구간을 코스트한다. 연소는 달 VNB 프레임에서 고정된 레트로그레이드 방향(‑x)으로 설정되어, 중력 손실이 최소인 근지점에서 ΔV를 집중한다. 이 방식은 연료 소비를 최소화하면서 이심률을 서서히 감소시켜 최종적으로 100 km 고도, 근접 원형 궤도(e ≈ 0.01)를 달성한다.
전체 미션은 450일 이내에 완료되며, 총 ΔV는 710 m/s, 연료 소모는 3 kg(전체 질량 대비 25 %)이다. 이는 설계된 추진 성능(930 m/s) 내에 충분히 들어맞는다. 최적화 결과는 독립적인 GMAT 시뮬레이션으로 검증되었으며, 두 모델 간 궤도 차이는 수십 미터 수준으로 매우 근접했다.
연구는 또한 현재 설계가 초기 상태 오차와 항법 오류에 민감함을 인정하고, 전역 탐색 알고리즘(차등 진화, 입자 군집 최적화 등)과 결합한 하이브리드 최적화 프레임워크를 향후 과제로 제시한다. 이는 초기 추정값에 대한 의존성을 감소시키고, 실제 운용 단계에서 발생할 수 있는 비선형 불확실성을 보다 견고하게 다룰 수 있게 할 것이다.
**
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기