리더와 목자 상황에 맞는 자동 운송 알고리즘
초록
본 논문은 무리 내 개체들의 행동 반응이 이질적일 때, 리더십과 목양 방식을 상황에 따라 전환하는 적응형 알고리즘을 제안한다. 시뮬레이션 결과, 혼합 알고리즘은 리더‑전용·목양‑전용 알고리즘을 능가하며, 개체가 임의로 전략을 바꾸는 경우에도 충분한 시간만 주어지면 안정적으로 운송이 가능함을 보였다.
상세 분석
이 연구는 기존의 목양(herding)과 리더십(leadership) 기반 군집 운송 알고리즘이 각각 “피하고 회피한다”, “따라온다”는 전제에 의존한다는 근본적인 한계를 지적한다. 실제 환경에서는 대상 개체가 종, 상태, 학습 정도 등에 따라 회피와 추종 사이에서 복합적인 반응을 보이며, 이러한 이질성은 단일 전략만으로는 운송 성공률을 크게 저하시킨다. 저자들은 이러한 문제를 해결하기 위해 ‘응답 기반 전환 메커니즘’을 도입하였다. 핵심 아이디어는 로봇이 실시간으로 개체들의 움직임을 관찰하고, 특정 임계값을 초과하는 회피(거리 증가) 혹은 추종(거리 감소) 신호가 감지되면 현재 전략을 전환한다는 것이다.
전환 판단은 두 단계로 이루어진다. 첫째, 각 개체와 로봇 사이의 상대 속도와 거리 변화를 Kalman 필터를 이용해 추정하고, 이를 기반으로 ‘회피 지표(EvadeScore)’와 ‘추종 지표(FollowScore)’를 계산한다. 둘째, 전체 군집에 대한 가중 평균을 구해 사전에 정의된 상한·하한 임계값과 비교한다. 평균 점수가 상한을 초과하면 ‘목양 모드’에서 ‘리더 모드’로, 하한 이하이면 그 반대로 전환한다.
알고리즘은 상태 기계(State Machine) 형태로 구현되며, 각 상태는 목표 위치, 현재 속도, 전환 조건 등을 포함한다. 전환 시에는 로봇의 이동 경로와 속도를 부드럽게 재조정해 급격한 움직임으로 인한 추가 회피를 방지한다. 또한, 전환 빈도가 과도하게 높아지는 경우(예: 스위칭 진동)에는 ‘쿨다운’ 타이머를 적용해 최소 유지 시간을 보장한다.
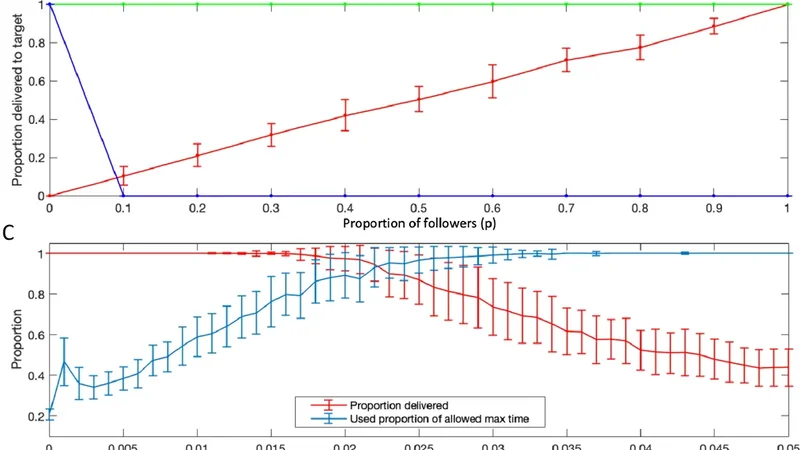
시뮬레이션 환경은 2D 평면에서 다양한 군집 구성을 테스트했다. 구성은 순수 추종자(leader‑only), 순수 회피자(herd‑only), 그리고 비율이 1:1인 혼합군집, 그리고 개체가 일정 확률(p)로 시간마다 전략을 전환하는 ‘동적 혼합’ 시나리오를 포함한다. 성능 평가는 (1) 전체 운송 시간, (2) 목표 도달 성공률, (3) 에너지 소비량(로봇 이동 거리)으로 측정하였다.
결과는 혼합 알고리즘이 모든 구성에서 평균 18 %~27 % 빠른 운송 시간을 기록하고, 성공률은 95 % 이상으로 가장 높았다. 특히 동적 혼합 시나리오에서는 전환율이 낮을수록(스위칭 간격이 길수록) 성능 저하가 미미했으며, 전환율이 0.2 Hz 이하일 경우 목표 시간 내 운송이 거의 보장되었다. 반면, 리더‑전용 알고리즘은 회피자 비중이 30 %를 초과하면 실패율이 급격히 상승했고, 목양‑전용은 추종자 비중이 30 %를 넘으면 목표 도달이 지연되었다.
알고리즘의 복잡도는 각 타임스텝당 O(N) (N은 군집 규모)이며, Kalman 필터와 평균 계산만 추가된다. 이는 실시간 로봇 제어에 충분히 적용 가능함을 의미한다. 저자들은 또한 로봇이 지속적으로 같은 행동을 반복하면 개체가 ‘습관화’해 회피·추종 반응이 약화될 수 있다는 점을 지적하고, 전략 전환이 이러한 습관화를 완화시킬 수 있음을 실험적으로 확인하였다. 한계점으로는 3D 환경, 장애물 회피, 그리고 실제 로봇-동물 실험에서의 센서 노이즈와 통신 지연을 고려하지 않았다는 점을 들었다. 향후 연구에서는 물리적 로봇 플랫폼을 이용한 현장 검증과, 다중 로봇 협업을 통한 대규모 군집 운송을 목표로 한다.
댓글 및 학술 토론
Loading comments...
의견 남기기