공중 투하형 나뭇가지 탐사 로봇 AMBER
초록
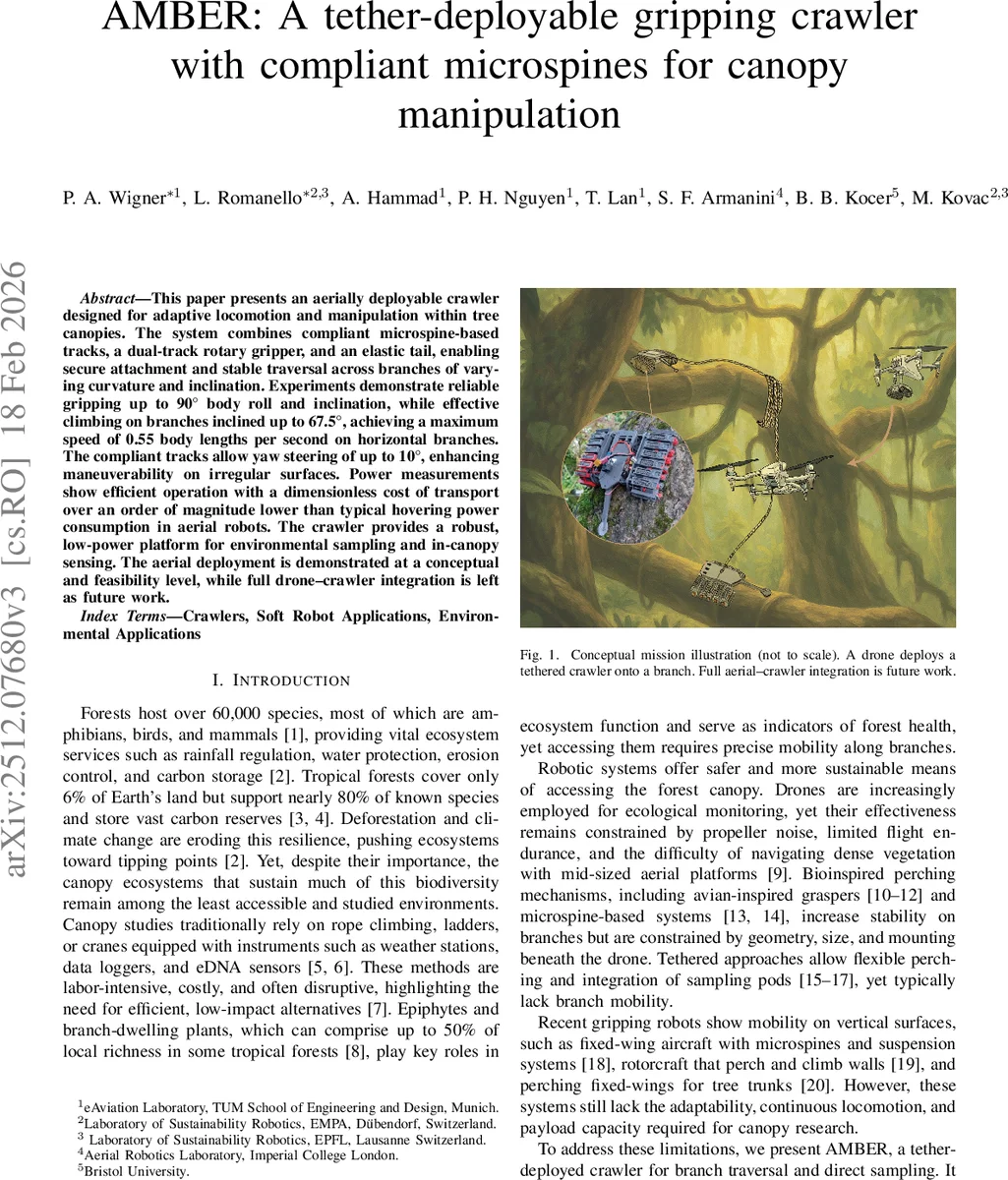
AMBER는 마이크로스파인 마찰을 이용한 유연한 트랙과 듀얼‑트랙 회전 그리퍼, 탄성 꼬리를 결합한 경량형 탐사 로봇이다. 드론에 테더로 연결해 공중에서 나뭇가지에 투하할 수 있으며, 90°까지의 몸통 롤·피치와 67.5°까지의 경사면을 안정적으로 그립하고, 수평 가지에서는 체길이당 0.55 m/s의 속도로 이동한다. 마이크로스파인의 순응성 덕분에 10°까지의 요우 조향이 가능하고, 전력 효율은 부양형 비행체보다 한 차례 정도 낮은 차원적 운송비용(COT)으로 구현된다.
상세 분석
본 논문은 기존의 나무줄기·가지 전용 로봇이 갖는 무게·구조·동작 연속성의 한계를 극복하기 위해, ‘Dual‑Track Rotary Grasper(DTRG)’와 ‘Compliant Microspine Track’를 핵심 메커니즘으로 채택한 AMBER 시스템을 제안한다. DTRG는 하나의 Dynamixel XL‑330‑M288‑T 서보를 1:4 감속기와 결합해 12.5 N의 그립력을 제공하며, 개방 각도 90°에서 폐쇄 각도 35°까지 연속적으로 조절한다. 이때 서보는 연속 전류 700 mA(0.25 Nm)로 제한해 과열을 방지하고, 기어비를 통해 토크를 증폭한다는 설계적 트레이드오프가 눈에 띈다.
트랙은 PLA 프린트 부품에 스프링‑연결된 스파인 캐리어를 삽입해, 각 스파인이 1 N 정도의 정상력을 가하면서 5 mm 정도의 횡방향 이동을 허용한다. 스파인 자체는 10 µm 팁 반경의 외과용 바늘을 사용해 미세 거칠기까지 잡아내며, 45°와 60° 두 가지 각도를 시험한 결과, 60°가 다양한 지름(40–150 mm)에서 일관된 그립을 제공한다는 실험적 근거를 제시한다.
탄성 휠형 꼬리는 100 mm 길이의 패시브 구조로, 스프링‑댐핑을 통해 충격을 흡수하고, 경사면에서 무게 중심을 보정한다. 실험에서는 꼬리 유무에 따라 45° 이하 피치에서는 최대 15 %의 정상 탈착력이 증가하고, 45°~90° 사이에서는 꼬리 없이는 그립이 불가능함을 확인했다. 이는 동물의 꼬리 역할을 모방한 설계가 실제 로봇의 안정성에 크게 기여함을 의미한다.
전력 측면에서는 트랙 구동 시 전류 1.2 A, 전압 7.4 V 수준을 유지하며, 속도 0.55 BL/s(체길이당)에서 차원적 운송비용(COT)이 부양형 드론(≈10배)보다 0.1배 수준으로 효율적임을 보고한다. 이는 저전력 지속 비행이 어려운 밀림·열대우림 환경에서 테더 기반 회수와 결합했을 때, 장시간 미션 수행이 가능함을 시사한다.
전체적으로 AMBER는 무게 700 g, 부피 54 × 37 mm× 120 mm 수준으로, 상용 DJI F450 드론에 탑재 시 비행시간 감소가 50 % 미만에 그친다는 실용적 장점을 갖는다. 다만, 현재는 독립적인 테더 회수 메커니즘과 자동 그립 각도 조절 센서가 부재하며, 실제 숲속 복합 지형에서의 장기 내구성 및 환경 적응성 검증이 향후 과제로 남는다.
댓글 및 학술 토론
Loading comments...
의견 남기기