학습 기반 불확실성 인식 3D 씬 그래프를 통한 고수준 공간 개념 자동 생성
초록
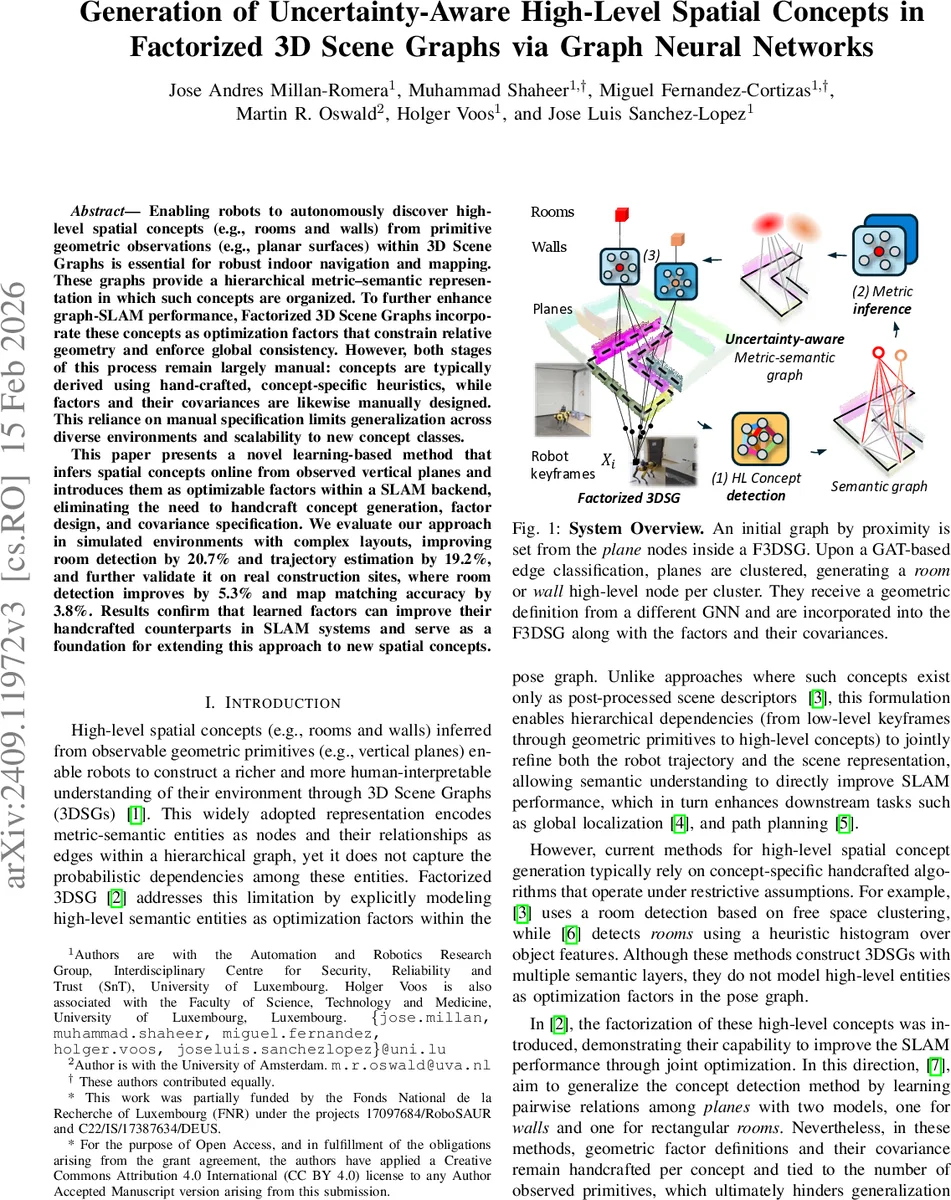
본 논문은 수직 평면 관측으로부터 방·벽과 같은 고수준 공간 개념을 온라인으로 추출하고, 이를 불확실성을 포함한 최적화 팩터로 변환해 SLAM 백엔드에 통합하는 학습 기반 프레임워크를 제안한다. 그래프 신경망(GNN) 기반의 의미 분류와 중심점 회귀를 결합해 자동으로 개념을 생성·정량화하며, 시뮬레이션과 실제 건설 현장 실험에서 방 탐지 정확도와 로봇 궤적 추정 성능을 크게 향상시킨다.
상세 분석
이 연구는 기존 Factorized 3D Scene Graph(F3DSG)에서 고수준 개념(rooms, walls)을 수동으로 정의하고, 해당 팩터와 공분산을 직접 설계하던 방식을 근본적으로 전환한다. 핵심은 두 단계의 그래프 신경망이다. 첫 번째 단계인 Sem‑GAT는 평면 노드 간의 k‑NN 기반 근접 그래프를 입력으로 받아, 각 엣지를 “same‑room”, “same‑wall”, “none” 중 하나로 분류한다. 여기서는 메시 패싱을 통해 노드와 엣지 임베딩을 동시에 업데이트하고, 베이지안 드롭아웃을 이용해 에피스테믹 불확실성을 추정한다. 분류 확신도가 사전 정의된 임계값을 초과하는 엣지만을 유지해 노이즈를 억제한다.
두 번째 단계인 Community Detection은 동일 개념으로 연결된 평면들의 서브그래프를 모듈러리티 최대화 알고리즘으로 클러스터링해 방·벽 후보 집합을 만든다. 시간적 안정성을 위해 IoU 기반 매칭과 EMA(Exponential Moving Average)로 confidence를 누적하고, 일정 횟수 이상 관측된 클러스터만을 최종 고수준 노드로 승격한다.
고수준 노드의 기하학적 속성(중심점)은 Met‑GNN을 통해 회귀한다. 각 클러스터에 대해 별도 스타 그래프를 구성하고, 평면의 중심·법선·길이 정보를 입력으로 단일 홉 메시 패싱 후 평균 풀링, 두 단계 MLP를 거쳐 2D 중심 좌표를 출력한다. 이 과정에서도 드롭아웃 기반 샘플링으로 예측 분산을 얻어, 이후 팩터의 공분산 행렬에 반영한다.
팩터 정의는 방의 경우 N‑ary 팩터(모든 구성 평면과 연결), 벽의 경우 이진 팩터(두 평면과 연결)로 구성된다. 팩터의 정보 행렬은 의미적 confidence와 기하학적 예측 불확실성을 결합해 자동으로 설정되므로, 기존에 수작업으로 지정하던 고정 공분산보다 상황에 맞는 가중치를 제공한다.
실험에서는 복잡한 레이아웃을 가진 시뮬레이션 환경에서 방 탐지 정확도가 20.7% 향상되고, 로봇 궤적 RMSE가 19.2% 감소하였다. 실제 건설 현장 데이터에서는 방 탐지가 5.3% 개선되고, 지도 매칭 정확도가 3.8% 상승했다. 이는 학습 기반 팩터가 기존 수작업 팩터보다 더 풍부한 정보를 제공함을 입증한다.
기술적 기여는 다음과 같다. (1) 평면 기반 고수준 개념을 온라인으로 생성하고, 의미·기하학적 불확실성을 동시에 모델링하는 통합 파이프라인, (2) 의미 분류와 중심점 회귀를 각각 독립적인 GNN으로 구현해 모듈화와 재사용성을 확보, (3) 학습된 팩터와 공분산을 SLAM 백엔드에 직접 삽입해 전체 시스템의 정확도와 견고성을 향상. 한계점으로는 현재 수직 평면에만 초점을 맞추어 확장성이 제한되고, 2D 중심점 회귀만 지원해 복잡한 비직교 구조에 대한 표현력이 부족하다는 점이다. 향후 연구에서는 다양한 기하학적 프리미티브(곡면, 복합 구조)와 3D 중심점·형상 회귀를 포함시켜 개념 범위를 넓히고, 베이지안 그래프 신경망을 도입해 불확실성 추정을 더욱 정교화할 여지가 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기