적응형 시계열 충돌 기반 탐색으로 구현한 폐쇄‑루프 다중 로봇 경로 찾기
초록
본 논문은 제한된 시계열을 이용한 CBS(Conflict‑Based Search)를 기반으로, 실행 중인 로봇 군집에 대해 동적으로 계획 시야를 확대·축소하는 ACCBS(Adaptive‑Horizon CBS) 알고리즘을 제안한다. 제한된 예산 안에서 빠르게 충돌‑무료 첫 번째 움직임을 제공하고, 남은 시간에 시야를 점진적으로 늘려가며 최종적으로 무한 시계열 CBS와 동일한 최적성을 보장한다. 실험을 통해 대규모 물류 환경에서도 높은 해결률과 낮은 비용을 달성함을 확인하였다.
상세 분석
ACCBS는 기존 CBS가 전체 경로를 한 번에 최적화하는 ‘오픈‑루프’ 방식의 한계를 극복하기 위해, MPC(모델 예측 제어)에서 영감을 얻은 ‘제한된 시계열’(finite‑horizon) CBS를 핵심 엔진으로 채택한다. 여기서 시계열 H는 현재 시점부터 H 단계만을 고려해 충돌‑무료 궤적을 생성하고, 첫 단계만 실행한다. 중요한 점은 두 가지 비용 구성요소이다. (1) 실행 단계마다 목표에 도달하지 않은 에이전트에 1점씩 부과되는 ‘런닝 코스트’와, (2) 시계열 끝에서 목표까지의 최단 거리인 ‘터미널 코스트’가 합산되어 전체 비용을 정의한다. 이 구조는 제한된 시계열 최적화 문제를 무한 시계열 문제의 근사치로 만들면서도, 비용이 비감소(Lyapunov) 성질을 유지하도록 설계되었다.
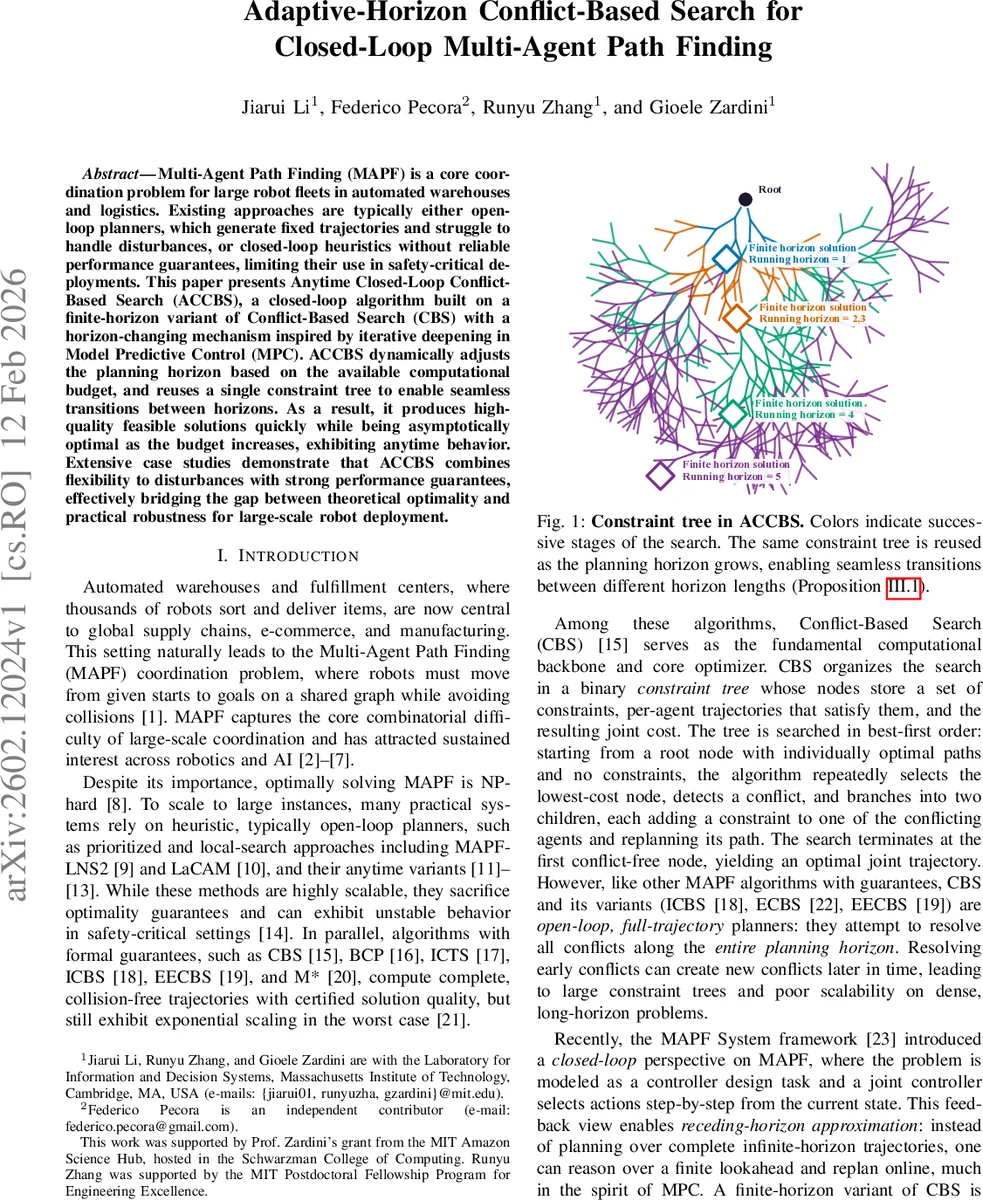
시계열 H를 고정하면 작은 H는 계산량이 적어 실시간 제어에 유리하지만, 장기적인 충돌 회피를 놓쳐 비효율적인 움직임을 초래한다. 반대로 큰 H는 전역적인 협조를 포착하지만, 제약 트리의 깊이가 급격히 늘어나 탐색 비용이 폭발한다. ACCBS는 이러한 딜레마를 ‘활성 프리픽스(active prefix)’와 ‘제약 트리 재사용(constraint‑tree reuse)’ 메커니즘으로 해결한다. 초기에는 작은 h_r(=H₀)으로 시작해 첫 번째 움직임을 확보하고, 남은 연산 시간 동안 h_r를 단계적으로 증가시킨다. 이때 기존에 구축된 제약 트리의 노드와 비용 정보를 그대로 유지해 새로운 시계열에 맞게 확장한다(정리 III.1). 결과적으로 알고리즘은 ‘anytime’ 특성을 가지며, 시간 예산이 늘어날수록 해의 품질이 점진적으로 향상된다.
이론적으로 논문은 Lemma III.1을 통해 시계열 확대 시 비용이 비감소함을 증명하고, Proposition III.1을 통해 제약 트리 재사용이 최적성에 영향을 주지 않음을 보인다. 이어서 Theorem III.2에서는 ACCBS가 제한된 시간 안에 해를 찾지 못하더라도, 무한히 실행될 경우 최종적으로 무한‑시계열 CBS와 동일한 최적 해에 수렴한다는 ‘점근 최적성(asymptotic optimality)’과 ‘완전성(completeness)’을 제시한다.
실험에서는 다양한 규모와 밀도의 격자 맵(작은 빈 맵, 무작위 맵, 대형 물류 시뮬레이션)에서 ACCBS와 기존 CBS, ECBS, MAPF‑LNS 등과 비교하였다. 결과는 동일한 시간 예산 하에서 ACCBS가 더 큰 인스턴스를 해결하고, 평균 비용이 10‑30% 낮으며, 특히 높은 밀도 구역에서 충돌 회피 능력이 크게 향상됨을 보여준다. 또한, 시계열을 점진적으로 늘리는 과정에서 전체 탐색 시간은 크게 증가하지 않아 실시간 제어 요구를 만족한다.
요약하면, ACCBS는 제한된 시계열 CBS에 동적 시계열 조정과 제약 트리 재활용을 결합함으로써, 실시간 로봇 군집 제어에 필요한 ‘유연성 + 이론적 보장’이라는 두 마리 토끼를 동시에 잡은 혁신적인 접근법이라 할 수 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기