휴머노이드 전신 조작 인터페이스
초록
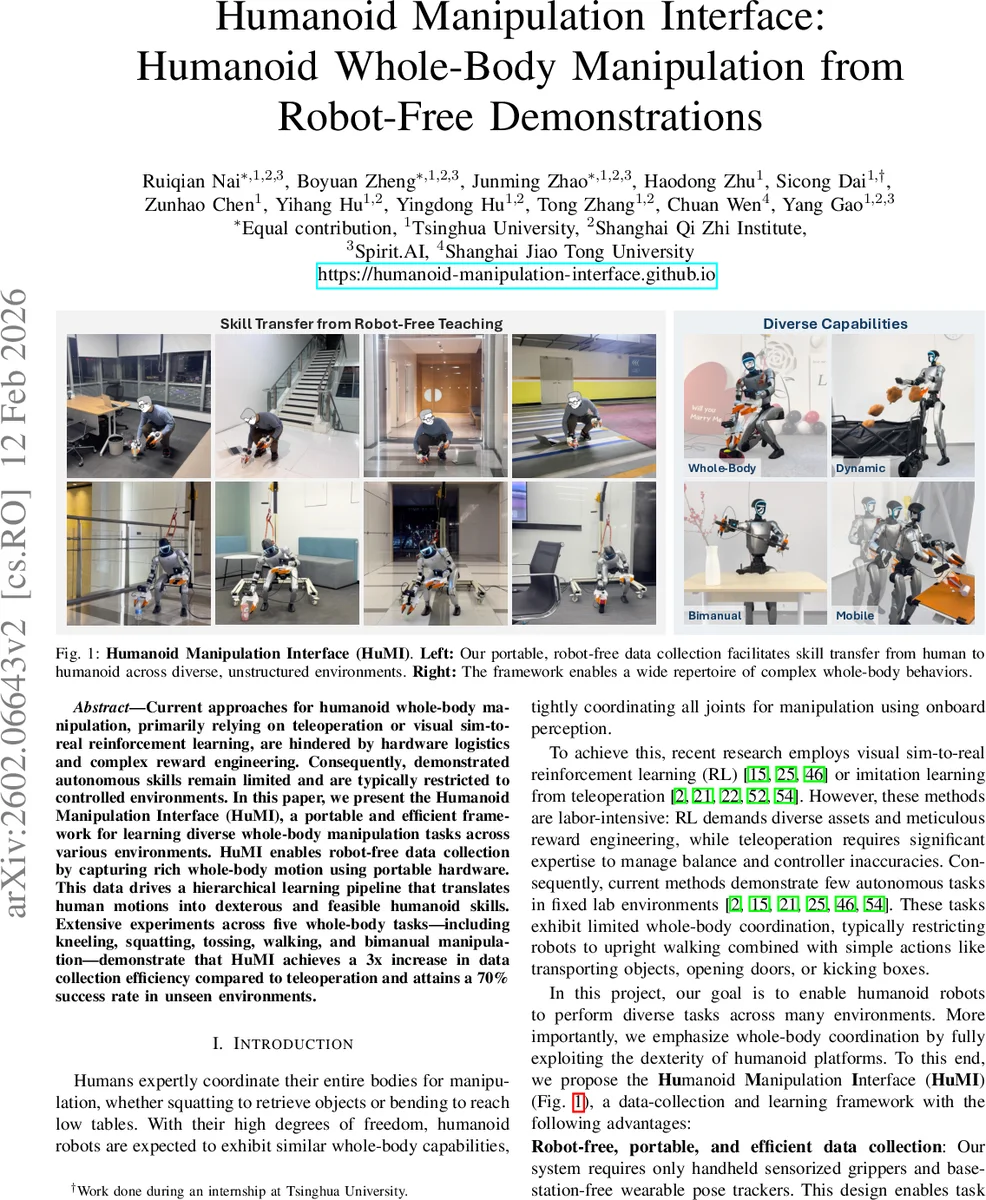
HuMI는 휴대용 센서와 실시간 IK 미리보기 시스템을 이용해 로봇 없이 인간의 전신 동작을 수집하고, 계층형 학습 파이프라인으로 이를 휴머노이드 로봇에 전이한다. 텔레오퍼레이션 대비 3배 빠른 데이터 수집과, 미지 환경에서 70% 성공률을 달성한다.
상세 분석
본 논문은 휴머노이드 로봇의 전신 조작을 위한 데이터 수집·학습 프레임워크인 HuMI(Humanoid Manipulation Interface)를 제안한다. 기존 연구는 텔레오퍼레이션이나 시뮬‑투‑리얼 강화학습에 의존했으나, 로봇 균형 제어와 복잡한 보상 설계가 필요해 실험 환경이 제한적이었다. HuMI는 이러한 한계를 ‘로봇‑프리’ 방식으로 극복한다. 첫 번째 핵심은 휴대형 하드웨어 구성이다. HTC VIVE Ultimate Tracker와 3D‑프린트 손잡이, 손목에 부착된 GoPro 카메라를 이용해 손, 골반, 양발의 6자유도 트래킹을 실시간으로 기록한다. 이때 인간의 원시 자세를 그대로 사용하고, 스케일링을 하지 않음으로써 물체와의 공간 관계를 보존한다. 그러나 인간과 로봇의 형태 차이로 인해 직접적인 전이 시 자가 충돌이나 도달 불가능 문제가 발생한다. 이를 해결하기 위해 온라인 IK 미리보기 인터페이스를 도입해 시연자가 실시간으로 로봇 모델의 자세를 확인하고, 필요 시 동작을 수정한다. 이렇게 얻어진 전신 트래젝터리는 역기구학을 통해 로봇의 전체 관절 공간으로 매핑된다.
두 번째 핵심은 계층형 정책 학습이다. 고수준 정책은 Diffusion Policy를 사용해 이미지와 관절 상태를 입력으로 받아 목표 키포인트(손, 발, 골반)의 시계열을 출력한다. 저수준 제어기는 강화학습 기반 전신 트래킹 컨트롤러로, 목표 키포인트를 고정밀(4~6 cm 이하)으로 따라가면서도 전체 몸통의 균형을 유지한다. 저수준 보상은 위치·방향·속도 오차에 대한 가우시안형 함수로 정의하고, 특히 엔드 이펙터에 대해서는 속도에 따라 허용 오차를 가변적으로 조정하는 ‘Adaptive End‑Effector Reward’를 설계했다. 이는 빠른 이동 단계에서는 관절 협응을 우선하고, 정밀 잡기 단계에서는 높은 정확도를 요구하도록 만든다. 또한, 실행 속도를
댓글 및 학술 토론
Loading comments...
의견 남기기